Product Description
Customized NEMA 23 BLDC DC Gear Geared Motor 24 48VDC Planetary Reduction Gearbox Integrated Driver Brushless DC Motor Power 10W Upto 800W
Product Description
Product Name: Brushless DC Motor
Number of Phase: 3 Phase
Number of Poles: 4 Poles /8 Poles /10 Poles
Rated Voltage: 12v /24v /36v /48v /310v
Rated Speed: 3000rpm /4000rpm /or customized
Rated Torque: Customized
Rated Current: Customized
Rated Power: 23w~2500W
Jkongmotor has a wide range of micro motor production lines in the industry, including Stepper Motor, DC Servo Motor, AC Motor, Brushless Motor, Planetary Gear Motor, Planetary Gearbox etc. Through technical innovation and customization, we help you create outstanding application systems and provide flexible solutions for various industrial automation situations.
57mm 36V Brushless DC Motor Parameters:
| Specification | Unit | Model | ||||
| JK57BLS005 | JK57BLS01 | JK57BLS02 | JK57BLS03 | JK57BLS04 | ||
| Number Of Phase | Phase | 3 | ||||
| Number Of Poles | Poles | 4 | ||||
| Rated Voltage | VDC | 36 | ||||
| Rated Speed | Rpm | 4000 | ||||
| Rated Torque | N.m | 0.055 | 0.11 | 0.22 | 0.33 | 0.44 |
| Rated Current | Amps | 1.2 | 2 | 3.6 | 5.3 | 6.8 |
| Rated Power | W | 23 | 46 | 92 | 138 | 184 |
| Peak Torque | N.m | 0.16 | 0.33 | 0.66 | 1 | 1.32 |
| Peak Current | Amps | 3.5 | 6.8 | 11.5 | 15.5 | 20.5 |
| Back E.M.F | V/Krpm | 7.8 | 7.7 | 7.4 | 7.3 | 7.1 |
| Torque Constant | N.m/A | 0.074 | 0.073 | 0.07 | 0.07 | 0.068 |
| Rotor Inertia | g.cm2 | 30 | 75 | 119 | 173 | 230 |
| Body Length | mm | 37 | 47 | 67 | 87 | 107 |
| Weight | Kg | 0.33 | 0.44 | 0.75 | 1 | 1.25 |
| Sensor | Honeywell | |||||
| Insulation Class | B | |||||
| Degree of Protection | IP30 | |||||
| Storage Temperature | -25~+70ºC | |||||
| Operating Temperature | -15~+50ºC | |||||
| Working Humidity | 85% RH or below (no condensation) | |||||
| Working Environment | Outdoor (no direct sunlight), no corrosive gas, no flammable gas, no oil mist, no dust | |||||
| Altitude | 1000 CHINAMFG or less | |||||
Planetary Gearbox Parameters:
| 56JXE300K | |
| Ring material | Metal |
| Bearing at output | Ball bearings |
| Max. Radial (12mm from flange) | 300N |
| Max. shaft axial load | 200N |
| Radial play of shaft (near to flange) | ≤0.08mm |
| Axial play of shaft | ≤0.4mm |
| Backlash at no-load | ≤2.5° |
| Shaft press fit force, max | 300N |
| Motor Shaft Pinion Specifications | |||
| Module | 1 | ||
| No. of teeth | 12 | 15 | 9 |
| Pressure angle | 20° | ||
| Hole diameter | Φ6H7 | ||
| Reduction ratio | 1/4.25 1/15 1/18 1/23 1/52 1/61 1/72 1/96 1/121 1/220 1/260 1/307 | 1/3.6 1/13 1/43 1/154 1/187 | 1/5.33 1/28 |
| Gearbox Specifications: | ||||||
| Reduction ratio | Exact reduction ratio | Rated tolerance torque | Max momentary tolerance torque | Efficiency | L (mm) | Weight (g) |
| 1/3.6 1/4.25 1/5.33 | 1/3.6 1/4.25 1/5.33 | 3 N.m Max | 9 N.m | 90% | 37.8±0.5 | 489 |
| 1/13 1/15 1/18 1/23 1/28 | 1/12.96 1/15.30 1/18.06 1/22.67 1/28.44 | 12 N.m Max | 36 N.m | 0.81 | 49.5±0.5 | 681 |
| 1/43 1/52 1/61 1/72 1/96 1/121 | 1/42.69 1/51.84 1/61.20 1/72.25 1/96.33 1/120.89 | 24 N.m Max | 72 N.m | 73% | 60.8±0.5 | 871 |
| 1/154 1/187 1/220 1/260 1/307 | 1/153.69 1/186.62 1/220.32 1/260.10 1/307.06 | 30 N.m Max | 90 N.m | 0.66 | 71.9±0.5 | 1066 |
| Input & output same rotation direction; Motor Max. input speed: <6000rpm; Operating temperature range: -15ºC ~ +80ºC | ||||||
We support many different Gearbox to customize, such as Planetary Gearbox, High Precision Planetary Gearbox, Worm gearbox, Eccentric Gearbox and so on. If you have any customized requirements, contact us immediately!!!
Planetary Gearbox Type:
42mm 24V Brushless DC Motor Parameters:
| Specification | Unit | Model | |||
| JK42BLS01 | JK42BLS02 | JK42BLS03 | JK42BLS04 | ||
| Number Of Phase | Phase | 3 | |||
| Number Of Poles | Poles | 8 | |||
| Rated Voltage | VDC | 24 | |||
| Rated Speed | Rpm | 4000 | |||
| Rated Torque | N.m | 0.0625 | 0.125 | 0.185 | 0.25 |
| Peak Current | Amps | 1.8 | 3.3 | 4.8 | 6.3 |
| Rated Power | W | 26 | 52.5 | 77.5 | 105 |
| Peak Torque | N.m | 0.19 | 0.38 | 0.56 | 0.75 |
| Peak Current | Amps | 5.4 | 10.6 | 15.5 | 20 |
| Back E.M.F | V/Krpm | 4.1 | 4.2 | 4.3 | 4.3 |
| Torque Constant | N.m/A | 0.039 | 0.04 | 0.041 | 0.041 |
| Rotor Inertia | g.cm2 | 24 | 48 | 72 | 96 |
| Body Length | mm | ||||
| Weight | Kg | ||||
| Sensor | Honeywell | ||||
| Insulation Class | B | ||||
| Degree of Protection | IP30 | ||||
| Storage Temperature | -25~+70ºC | ||||
| Operating Temperature | -15~+50ºC | ||||
| Working Humidity | 85% RH or below (no condensation) | ||||
| Working Environment | Outdoor (no direct sunlight), no corrosive gas, no flammable gas, no oil mist, no dust | ||||
| Altitude | 1000 CHINAMFG or less | ||||
60mm 48V Brushless DC Motor Parameters:
| Specification | Unit | Model | |||
| JK60BLS01 | JK60BLS02 | JK60BLS03 | JK60BLS04 | ||
| Number Of Phase | Phase | 3 | |||
| Number Of Poles | Poles | 8 | |||
| Rated Voltage | VDC | 48 | |||
| Rated Speed | Rpm | 3000 | |||
| Rated Torque | N.m | 0.3 | 0.6 | 0.9 | 1.2 |
| Rated Current | Amps | 2.8 | 5.2 | 7.5 | 9.5 |
| Rated Power | W | 94 | 188 | 283 | 377 |
| Peak Torque | N.m | 0.9 | 1.8 | 2.7 | 3.6 |
| Peak Current | Amps | 8.4 | 15.6 | 22.5 | 28.5 |
| Back E.M.F | V/Krpm | 12.1 | 12.6 | 12.4 | 13.3 |
| Torque Constant | N.m/A | 0.116 | 0.12 | 0.118 | 0.127 |
| Rotor Inertia | kg.cm2 | 0.24 | 0.48 | 0.72 | 0.96 |
| Body Length | mm | 78 | 99 | 120 | 141 |
| Weight | Kg | 0.85 | 1.25 | 1.65 | 2.05 |
| Sensor | Honeywell | ||||
| Insulation Class | B | ||||
| Degree of Protection | IP30 | ||||
| Storage Temperature | -25~+70ºC | ||||
| Operating Temperature | -15~+50ºC | ||||
| Working Humidity | 85% RH or below (no condensation) | ||||
| Working Environment | Outdoor (no direct sunlight), no corrosive gas, no flammable gas, no oil mist, no dust | ||||
| Altitude | 1000 CHINAMFG or less | ||||
80mm 48V BLDC Motor Parameters:
| Specification | Unit | Model | |||
| JK80BLS01 | JK80BLS02 | JK80BLS03 | JK80BLS04 | ||
| Number Of Phase | Phase | 3 | |||
| Number Of Poles | Poles | 4 | |||
| Rated Voltage | VDC | 48 | |||
| Rated Speed | Rpm | 3000 | |||
| Rated Torque | N.m | 0.35 | 0.7 | 1.05 | 1.4 |
| Rated Current | Amps | 3 | 5.5 | 8 | 10.5 |
| Rated Power | W | 110 | 220 | 330 | 440 |
| Peak Torque | N.m | 1.05 | 2.1 | 3.15 | 4.2 |
| Peak Current | Amps | 9 | 16.5 | 24 | 31.5 |
| Back E.M.F | V/Krpm | 13.5 | 13.3 | 13.1 | 13 |
| Torque Constant | N.m/A | 0.13 | 0.127 | 0.126 | 0.124 |
| Rotor Inertia | g.cm2 | 210 | 420 | 630 | 840 |
| Body Length | mm | 78 | 98 | 118 | 138 |
| Weight | Kg | 1.4 | 2 | 2.6 | 3.2 |
| Sensor | Honeywell | ||||
| Insulation Class | B | ||||
| Degree of Protection | IP30 | ||||
| Storage Temperature | -25~+70ºC | ||||
| Operating Temperature | -15~+50ºC | ||||
| Working Humidity | 85% RH or below (no condensation) | ||||
| Working Environment | Outdoor (no direct sunlight), no corrosive gas, no flammable gas, no oil mist, no dust | ||||
| Altitude | 1000 CHINAMFG or less | ||||
86mm 48V Dc Brushless Motor Parameters:
| Specification | Unit | Model | ||||
| JK86BLS58 | JK86BLS71 | JK86BLS84 | JK86BLS98 | JK86BLS125 | ||
| Number Of Phase | Phase | 3 | ||||
| Number Of Poles | Poles | 8 | ||||
| Rated Voltage | VDC | 48 | ||||
| Rated Speed | Rpm | 3000 | ||||
| Rated Torque | N.m | 0.35 | 0.7 | 1.05 | 1.4 | 2.1 |
| Rated Current | Amps | 3 | 6.3 | 9 | 11.5 | 18 |
| Rated Power | W | 110 | 220 | 330 | 440 | 660 |
| Peak Torque | N.m | 1.05 | 2.1 | 3.15 | 4.2 | 6.3 |
| Peak Current | Amps | 9 | 19 | 27 | 35 | 54 |
| Back E.M.F | V/Krpm | 13.7 | 13 | 13.5 | 13.7 | 13.5 |
| Torque Constant | N.m/A | 0.13 | 0.12 | 0.13 | 0.13 | 0.13 |
| Rotor Inertia | g.cm2 | 400 | 800 | 1200 | 1600 | 2400 |
| Body Length | mm | 71 | 84.5 | 98 | 111.5 | 138.5 |
| Weight | Kg | 1.5 | 1.9 | 2.3 | 2.7 | 4 |
| Sensor | Honeywell | |||||
| Insulation Class | B | |||||
| Degree of Protection | IP30 | |||||
| Storage Temperature | -25~+70ºC | |||||
| Operating Temperature | -15~+50ºC | |||||
| Working Humidity | 85% RH or below (no condensation) | |||||
| Working Environment | Outdoor (no direct sunlight), no corrosive gas, no flammable gas, no oil mist, no dust | |||||
| Altitude | 1000 CHINAMFG or less | |||||
110mm 310V Brushless Motor Parameters:
| Specification | Unit | Model | |||
| JK110BLS050 | JK110BLS75 | JK110BLS100 | JK110BLS125 | ||
| Number Of Phase | Phase | 3 | |||
| Number Of Poles | Poles | 8 | |||
| Rated Voltage | VDC | 310 | |||
| Rated Speed | Rpm | 3400 | |||
| Rated Torque | N.m | 2.38 | 3.3 | 5 | 6.6 |
| Rated Current | Amps | 0.5 | 0.6 | 0.8 | 1 |
| Rated Power | KW | 0.75 | 1.03 | 1.57 | 2.07 |
| Back E.M.F | V/Krpm | 91.1 | 91.1 | 91.1 | 88.6 |
| Torque Constant | N.m/A | 0.87 | 0.87 | 0.87 | 0.845 |
| Body Length | mm | 130 | 155 | 180 | 205 |
| Sensor | Honeywell | ||||
| Insulation Class | H | ||||
Stepping Motor Customized
Detailed Photos
Cnc Motor Kits Brushless dc Motor with Brake
Brushless Dc Motor with Planetary Gearbox Bldc Motor with Encoder
Brushless Dc Motor Brushed Dc Motor Hybrid Stepper Motor
Company Profile
HangZhou CHINAMFG Co., Ltd was a high technology industry zone in HangZhou, china. Our products used in many kinds of machines, such as 3d printer CNC machine, medical equipment, weaving printing equipments and so on.
JKONGMOTOR warmly welcome ‘OEM’ & ‘ODM’ cooperations and other companies to establish long-term cooperation with us.
Company spirit of sincere and good reputation, won the recognition and support of the broad masses of customers, at the same time with the domestic and foreign suppliers close community of interests, the company entered the stage of stage of benign development, laying a CHINAMFG foundation for the strategic goal of realizing only really the sustainable development of the company.
Equipments Show:
Production Flow:
Package:
Certification:
1. who are we?
We are based in ZheJiang , China, start from 2011,sell to Domestic Market(26.00%),Western Europe(20.00%),North
America(20.00%),Northern Europe(10.00%),Eastern Europe(7.00%),Africa(5.00%),Southeast Asia(5.00%),Mid East(5.00%),South America(2.00%). There are total about 51-100 people in our office.
2. how can we guarantee quality?
We are based in ZheJiang , China, start from 2011,sell to Domestic Market(26.00%),Western Europe(20.00%),North
America(20.00%),Northern Europe(10.00%),Eastern Europe(7.00%),Africa(5.00%),Southeast Asia(5.00%),Mid East(5.00%),South America(2.00%). There are total about 51-100 people in our office.
3.what can you buy from us?
Always a pre-production sample before mass production;
Always final Inspection before shipment;
4. why should you buy from us not from other suppliers?
Professional one-to-1 motor customized . The world’s large enterprise of choice for high quality suppliers . ISO9001:2008 quality management system certification, through the CE, ROHS certification.
5. what services can we provide?
Accepted Delivery Terms: FOB,CFR,CIF,EXW,CIP,FCA,CPT,DDP,DDU,Express Delivery,DAF,DES;
Accepted Payment Currency:USD,EUR,CAD,HKD,GBP,CNY;
Accepted Payment Type: T/T,L/C,D/P D/A,MoneyGram,Credit Card,PayPal,Western Union,Cash,Escrow;
Language Spoken:English,Chinese
/* January 22, 2571 19:08:37 */!function(){function s(e,r){var a,o={};try{e&&e.split(“,”).forEach(function(e,t){e&&(a=e.match(/(.*?):(.*)$/))&&1
| Application: | Universal, Industrial, Household Appliances, Car, Power Tools |
|---|---|
| Operating Speed: | High Speed |
| Excitation Mode: | Compound |
| Samples: |
US$ 50/Piece
1 Piece(Min.Order) | Order Sample need to confirm the cost with seller
|
|---|
| Customization: |
Available
|
|
|---|
.shipping-cost-tm .tm-status-off{background: none;padding:0;color: #1470cc}
|
Shipping Cost:
Estimated freight per unit. |
about shipping cost and estimated delivery time. |
|---|
| Payment Method: |
|
|---|---|
|
Initial Payment Full Payment |
| Currency: | US$ |
|---|
| Return&refunds: | You can apply for a refund up to 30 days after receipt of the products. |
|---|
What factors should be considered when selecting a brushless motor for a specific application?
When selecting a brushless motor for a specific application, several factors need to be considered to ensure optimal performance and compatibility. Here are the key factors to take into account:
1. Power and Torque Requirements:
Determine the power and torque requirements of the application. This includes considering the desired operating speed, acceleration, and load characteristics. Select a brushless motor that can deliver the required power and torque output within the application’s operating range. Consider factors such as the motor’s power rating, torque density, and speed-torque characteristics.
2. Size and Form Factor:
Evaluate the space available for motor installation. Consider the physical dimensions and form factor of the motor to ensure it can fit within the application’s constraints. Additionally, consider the weight of the motor, especially in applications where weight is a critical factor, such as drones or portable devices.
3. Environmental Conditions:
Assess the environmental conditions in which the motor will operate. Consider factors such as temperature extremes, humidity, dust, and vibration levels. Choose a brushless motor that is designed to withstand and perform reliably in the specific environmental conditions of the application. Look for motors with appropriate protection ratings (e.g., IP ratings) and robust construction.
4. Efficiency and Energy Consumption:
Consider the desired energy efficiency of the application. Select a brushless motor with high efficiency to minimize energy consumption and maximize overall system efficiency. Efficiency can be influenced by factors such as motor design, winding configuration, and the use of advanced control techniques. Look for motors with high efficiency ratings or specific certifications, such as IE (International Efficiency) classifications.
5. Control and Feedback Requirements:
Evaluate the control and feedback requirements of the application. Determine if sensorless control or position feedback through sensors (e.g., encoders) is necessary for precise speed or position control. Consider the compatibility of the motor’s control interfaces and communication protocols with the application’s control system. Some applications may require motors with built-in control electronics or compatibility with specific motor controllers.
6. Operating Voltage and Power Supply:
Determine the available power supply and the operating voltage range of the application. Select a brushless motor that operates within the available voltage range and is compatible with the power supply infrastructure. Consider factors such as voltage ratings, current requirements, and the availability of appropriate power supply units or motor drives.
7. Expected Lifetime and Reliability:
Evaluate the expected lifetime and reliability requirements of the application. Consider factors such as the motor’s rated lifetime, bearing type, insulation class, and overall build quality. Look for motors from reputable manufacturers with a track record of producing reliable and durable products. Consider the availability of maintenance and support services.
8. Cost and Budget:
Consider the cost and budget limitations of the application. Balance the desired motor performance and features with the available budget. Compare the costs of different motor options, taking into account factors such as initial purchase cost, maintenance requirements, and potential energy savings over the motor’s lifetime.
9. Application-Specific Considerations:
Take into account any application-specific requirements or constraints. This may include factors such as regulatory compliance, specific certifications (e.g., safety or industry-specific certifications), compatibility with other system components, and any unique operational or functional requirements of the application.
By carefully considering these factors, you can select a brushless motor that is well-suited for the specific application, ensuring optimal performance, efficiency, reliability, and compatibility.
Are there different configurations of brushless motors, and how do they differ?
Yes, there are different configurations of brushless motors, each designed to meet specific application requirements and operating conditions. These configurations differ in terms of the arrangement of the motor components, such as the rotor, stator, and magnet configuration. Here’s a detailed explanation of the various configurations of brushless motors and how they differ:
- Outrunner Configuration: In an outrunner configuration, the rotor is located on the outside of the stator. The rotor consists of a ring-shaped permanent magnet assembly with multiple magnetic poles, while the stator contains the motor windings. The outrunner configuration offers several advantages, including high torque output, robust construction, and efficient heat dissipation. Outrunner motors are commonly used in applications that require high torque and moderate speed, such as electric vehicles, robotics, and aircraft propulsion systems.
- Inrunner Configuration: In an inrunner configuration, the rotor is located on the inside of the stator. The rotor typically consists of a solid cylindrical core with embedded permanent magnets, while the stator contains the motor windings. Inrunner motors are known for their compact size, high speed capabilities, and precise speed control. They are commonly used in applications that require high-speed rotation and compact form factors, such as drones, small appliances, and industrial automation equipment.
- Internal Rotor Configuration: The internal rotor configuration, also known as an internal rotor motor (IRM), features a rotor located inside the stator. The rotor consists of a laminated core with embedded magnets, while the stator contains the motor windings. Internal rotor motors offer high power density, efficient heat dissipation, and excellent dynamic response. They are commonly used in applications that require high-performance and compact size, such as electric vehicles, industrial machinery, and robotics.
- External Rotor Configuration: The external rotor configuration, also known as an external rotor motor (ERM), features a rotor located on the outside of the stator. The rotor consists of a magnet assembly with multiple magnetic poles, while the stator contains the motor windings. External rotor motors offer high torque density, compact size, and high starting torque capabilities. They are commonly used in applications that require high torque and compact design, such as cooling fans, HVAC systems, and small electric appliances.
- Radial Flux Configuration: In a radial flux configuration, the magnetic flux flows radially from the center to the periphery of the motor. This configuration typically consists of a disc-shaped rotor with magnets on the periphery and a stator with motor windings arranged in a radial pattern. Radial flux motors offer high torque density, efficient heat dissipation, and good power output. They are commonly used in applications that require high torque and compact size, such as electric bicycles, electric scooters, and power tools.
- Axial Flux Configuration: In an axial flux configuration, the magnetic flux flows axially along the length of the motor. This configuration typically consists of a pancake-shaped rotor with magnets on both faces and a stator with motor windings arranged in an axial pattern. Axial flux motors offer high power density, efficient cooling, and compact design. They are commonly used in applications that require high power output and limited axial space, such as electric vehicles, wind turbines, and aerospace systems.
In summary, different configurations of brushless motors include outrunner, inrunner, internal rotor, external rotor, radial flux, and axial flux configurations. These configurations differ in terms of the arrangement of motor components, such as the rotor and stator, and offer unique characteristics suited for specific applications. Understanding the differences between these configurations is essential for selecting the most suitable brushless motor for a given application.

In which industries are brushless motors commonly employed, and what are their key roles?
Brushless motors find applications in a wide range of industries, thanks to their numerous advantages and capabilities. Here are some of the industries where brushless motors are commonly employed and their key roles:
1. Automotive Industry:
In the automotive industry, brushless motors are used in electric vehicles (EVs) and hybrid electric vehicles (HEVs). They play a crucial role in providing propulsion for these vehicles, driving the wheels and ensuring efficient power delivery. Brushless motors offer high efficiency, precise control, and fast acceleration, making them ideal for electric drivetrains. Additionally, they are employed in various automotive subsystems such as electric power steering, HVAC systems, cooling fans, and braking systems.
2. Aerospace and Aviation:
Brushless motors have significant applications in the aerospace and aviation sectors. They are used in aircraft systems such as flight control surfaces, landing gear actuation, fuel pumps, and environmental control systems. Brushless motors provide reliable and precise motion control in critical aerospace applications, contributing to the safety and efficiency of aircraft operations. Their high power-to-weight ratio, compact size, and high-speed capabilities make them well-suited for aerospace requirements.
3. Robotics and Automation:
Brushless motors are extensively employed in robotics and automation systems. They power robotic arms, joints, and grippers, enabling accurate and controlled movements. Brushless motors offer high torque, precise position control, and rapid acceleration, making them vital for industrial robotics, collaborative robots (cobots), and automated manufacturing processes. Their compact size and efficiency also contribute to the design and performance of robotic systems.
4. Industrial Machinery and Equipment:
Brushless motors play a crucial role in various industrial machinery and equipment. They are used in machine tools, conveyors, pumps, compressors, and other industrial automation applications. Brushless motors provide reliable and efficient motion control, contributing to the productivity and performance of industrial processes. Their ability to handle high loads, operate at high speeds, and offer precise control makes them valuable in demanding industrial environments.
5. Medical and Healthcare:
In the medical and healthcare sector, brushless motors are employed in various medical devices and equipment. They are used in surgical tools, prosthetics, medical pumps, laboratory equipment, imaging systems, and more. Brushless motors offer quiet operation, precise control, and compact size, making them suitable for applications where accuracy, reliability, and patient comfort are critical.
6. Consumer Electronics:
Brushless motors are found in numerous consumer electronic devices. They power computer cooling fans, hard disk drives, drones, camera gimbals, electric toothbrushes, and other portable devices. Brushless motors in consumer electronics provide efficient and reliable operation while minimizing noise and vibration. Their small size, lightweight, and high-speed capabilities contribute to the design and functionality of modern consumer electronic products.
These are just a few examples of the industries where brushless motors are commonly employed. Their efficiency, reliability, precise control, compact size, and high-performance characteristics make them versatile and valuable in many other sectors as well. As technology continues to advance, brushless motors are likely to find new applications and play increasingly important roles in various industries.


editor by CX 2024-05-14
China Best Sales Customizable Electric Brushed Brushless DC Motor 12V 18V 24V 36V 48V 310V PMDC/BLDC Planetary/Worm Gear Motor 12 24 36 48 Volt 15W 50W 100W 200W 300W 500W 800W vacuum pump oil
Product Description
Brushed or Brushless DC Motors, Customized Specifications, OEM/ODM
Option for :
Customized shaft, performance, voltage, mounting, lead wires..
Option for :
Electric Brake, Planetary Gearbox, Worm Gearbox, Encoder, Controller Integrated
1. BRUSHED DC MOTOR :
Voltage 12v, 24v, 36v, 48v, upto 310vdc
power 5w to 1000w
speed 1pm upto 10000rpm
Dia. 30mm, 32mm, 36mm, 38mm, 42mm, 52mm, 54mm, 63mm, 70mm, 76mm, 80mm, 90mm, 110mm
Belows are some typical models,
2. BRUSHLESS DC MOTOR :
Voltage 12v, 24v, 36v, 48v, upto 380vdc
power 5w to 2000w
speed 1pm upto 15000rpm
Size 28mm, 30mm, 36mm, 42mm, 57mm, 60mm, 63mm, 70mm, 80mm, 86mm, 110mm
| Bearing | High quality ball bearing |
| Poles | 4- poles 8-poles 12-poles |
| Protection class | IP40 IP55 option |
| Insulation class | class: F |
Belows are some typical models,
Below are only some typical models for reference.
63ZYT Series Permanent magnet Brushed Dc Motors
57HBL Series Brushless Dc Motors
56JXE300K. 63ZYT Series Dc Planetary Gear Motor
56JXE300K. 57HBL Series Brushless Dc Planetary Gear Motor
/* January 22, 2571 19:08:37 */!function(){function s(e,r){var a,o={};try{e&&e.split(“,”).forEach(function(e,t){e&&(a=e.match(/(.*?):(.*)$/))&&1
| Application: | Universal, Industrial, Household Appliances, Car, Power Tools, Machine, Robot |
|---|---|
| Operating Speed: | Constant Speed |
| Excitation Mode: | Pm |
| Function: | Control, Driving |
| Casing Protection: | Closed Type |
| Number of Poles: | 2 |
| Customization: |
Available
|
|
|---|

How do brushless motors compare to brushed motors in terms of lifespan and reliability?
When comparing brushless motors to brushed motors, there are notable differences in terms of lifespan and reliability. Here’s a detailed explanation of how brushless motors compare to brushed motors in these aspects:
1. Lifespan:
Brushed motors typically have a shorter lifespan compared to brushless motors. This is primarily due to the mechanical wear and tear associated with brushed motors. In brushed motors, the brushes and commutator make physical contact, causing friction, heat generation, and eventual wear. Over time, the brushes wear down and the commutator may become worn or damaged, leading to degraded motor performance and eventual failure. On the other hand, brushless motors do not have brushes or commutators, eliminating the mechanical wear components. As a result, brushless motors generally have a longer lifespan and can operate for thousands of hours with minimal maintenance.
2. Reliability:
Brushless motors are generally considered more reliable than brushed motors. The absence of brushes and commutators in brushless motors reduces the risk of failure due to mechanical wear and associated issues like brush sparking and arcing. The elimination of these moving parts also leads to reduced friction, less heat generation, and lower chances of electrical or mechanical failures. Additionally, brushless motors often benefit from advanced control systems that can monitor and protect against various operating conditions, enhancing their overall reliability.
3. Operating Conditions:
Brushless motors are better suited for demanding operating conditions compared to brushed motors. The absence of brushes and commutators in brushless motors means there are no physical contacts that can generate sparks or cause electrical arcing. This makes brushless motors more suitable for applications where sparks or electrical noise can be problematic, such as in explosive or sensitive electronic environments. Furthermore, brushless motors can operate at higher speeds and handle higher torque loads than brushed motors, making them more versatile in a wide range of applications.
4. Maintenance:
Brushless motors generally require less maintenance compared to brushed motors. Brushed motors often require periodic maintenance to replace worn-out brushes and address commutator issues. Additionally, the presence of brushes can lead to carbon dust buildup, requiring regular cleaning and maintenance. In contrast, brushless motors have no brushes or commutators to replace or clean, significantly reducing the maintenance requirements. However, it’s important to note that brushless motors may still require periodic inspections, especially for cooling systems or bearings, to ensure optimal performance and reliability.
5. Efficiency:
Brushless motors are typically more efficient than brushed motors. The absence of brushes and commutators in brushless motors reduces energy losses associated with friction and electrical resistance. This improved efficiency results in several benefits, such as reduced power consumption, longer battery life (in battery-powered applications), and less heat generation. Brushless motors are known for their high power-to-weight ratio and can deliver higher torque output per unit of input power compared to brushed motors.
In summary, brushless motors generally offer a longer lifespan and higher reliability compared to brushed motors. The absence of brushes and commutators reduces mechanical wear and associated failures, making brushless motors more durable. They are better suited for demanding operating conditions, require less maintenance, and offer improved efficiency. These factors have made brushless motors increasingly popular in various applications, including robotics, electric vehicles, industrial automation, and aerospace, where reliability and longevity are essential.
What is the significance of commutation in brushless motor operation, and how is it achieved?
Commutation is a critical aspect of brushless motor operation as it determines the timing and sequence of current flow in the motor windings. It is the process by which the motor’s magnetic field is switched to generate continuous rotation. The significance of commutation lies in its ability to maintain proper alignment between the magnetic field produced by the stator and the rotor’s permanent magnets, resulting in smooth and efficient motor operation. Here’s a detailed explanation of the significance of commutation in brushless motor operation and how it is achieved:
1. Magnetic Field Alignment: Commutation ensures that the magnetic field produced by the motor’s stator windings is properly aligned with the permanent magnets on the rotor. This alignment is crucial for generating the necessary torque to drive the rotor and produce rotation. By switching the current flow in the motor windings at the right time and in the right sequence, commutation ensures that the stator’s magnetic field interacts effectively with the rotor’s magnets, producing continuous and smooth rotation.
2. Efficient Power Conversion: Commutation plays a vital role in efficient power conversion within the brushless motor. As the current flows through the motor windings, commutation switches the current path to maintain the desired direction of rotation. By timely switching the current flow, commutation minimizes power losses and maximizes the energy transfer between the power supply and the motor. This efficient power conversion results in improved motor performance, higher energy efficiency, and reduced heat generation.
3. Elimination of Brushes and Commutators: Unlike brushed motors that rely on mechanical brushes and commutators for current switching, brushless motors achieve commutation electronically. This eliminates the need for brushes and commutators, which are prone to wear, friction, and electrical arcing. By replacing these mechanical components with solid-state electronic commutation, brushless motors offer several advantages, including reduced maintenance requirements, longer lifespan, and improved reliability.
4. Precise Speed Control: Commutation in brushless motors enables precise speed control. By accurately timing and sequencing the current flow in the motor windings, the control system of a brushless motor can regulate the motor’s rotational speed. This precise speed control is crucial in applications that require specific speed requirements, such as robotics, electric vehicles, and industrial automation.
5. Commutation Methods: Brushless motors achieve commutation through various methods, the most common being sensor-based commutation and sensorless commutation. Sensor-based commutation utilizes position sensors, such as Hall effect sensors or encoders, to detect the rotor’s position and determine the appropriate timing and sequence of current switching. Sensorless commutation, on the other hand, estimates the rotor position based on the back electromotive force (EMF) generated in the motor windings. Advanced control algorithms and signal processing techniques are employed to accurately estimate the rotor position and achieve precise commutation without the need for additional sensors.
In summary, commutation is of significant importance in brushless motor operation. It ensures proper alignment of the magnetic fields, enables efficient power conversion, eliminates mechanical wear components, allows for precise speed control, and contributes to the overall performance and reliability of brushless motors. Through sensor-based or sensorless commutation methods, brushless motors achieve accurate and timely switching of current flow, resulting in smooth rotation and optimal motor performance.
Can you explain the working principle of brushless motors and how they generate motion?
Brushless motors operate based on the principles of electromagnetism and electronic commutation. Here’s an explanation of the working principle of brushless motors and how they generate motion:
1. Stator and Rotor:
A brushless motor consists of two main components: a stationary stator and a rotating rotor. The stator contains multiple coils or windings arranged in a specific pattern. These windings are typically made of copper wire and are evenly spaced around the inner circumference of the motor housing. The rotor, on the other hand, contains permanent magnets that are magnetized in a specific pattern.
2. Electronic Commutation:
The key difference between brushless motors and brushed motors is the method of commutation. In brushed motors, commutation is achieved mechanically through brushes and a commutator. However, in brushless motors, commutation is electronic. The commutation process is managed by an external controller or electronic speed controller (ESC).
3. Rotor Position Detection:
To determine the rotor’s position, brushless motors use sensors or Hall effect devices embedded in the stator. These sensors detect the position of the permanent magnets on the rotor as it rotates. The sensor information is sent to the controller, which uses it to determine the timing and sequence of current flow in the stator windings.
4. Current Distribution:
Based on the rotor position information, the controller determines which stator windings need to be energized to generate the desired motion. The controller then sends electric currents to the appropriate windings in a specific sequence. By energizing different windings at different times, the controller can create a rotating magnetic field in the stator.
5. Magnetic Field Interaction:
As the rotating magnetic field is generated in the stator, it interacts with the permanent magnets on the rotor. The interaction between the rotating magnetic field and the permanent magnets causes the rotor to rotate. The controller continuously adjusts the timing and amplitude of the currents flowing through the stator windings to maintain the rotation and control the motor’s speed and torque.
6. Continuous Rotation:
Brushless motors achieve continuous rotation by continuously updating the rotor position using the sensors and adjusting the current flow in the stator windings accordingly. The electronic commutation process ensures that the currents are switched at the right time and in the right sequence to maintain the rotation and provide precise control over the motor’s operation.
By using electronic commutation and precise control over the currents in the stator windings, brushless motors generate motion with high efficiency, reliability, and accuracy. They offer advantages such as higher speed capabilities, smoother operation, reduced maintenance requirements, and improved overall performance compared to brushed motors. These characteristics make brushless motors widely used in various applications, ranging from small consumer electronics to large industrial machinery.
editor by CX 2024-05-09
China supplier Customizable Electric Brushed Brushless DC Motor 12V 18V 24V 36V 48V 310V PMDC/BLDC Planetary/Worm Gear Motor 12 24 36 48 Volt 15W 50W 100W 200W 300W 500W 800W vacuum pump and compressor
Product Description
Brushed or Brushless DC Motors, Customized Specifications, OEM/ODM
Option for :
Customized shaft, performance, voltage, mounting, lead wires..
Option for :
Electric Brake, Planetary Gearbox, Worm Gearbox, Encoder, Controller Integrated
1. BRUSHED DC MOTOR :
Voltage 12v, 24v, 36v, 48v, upto 310vdc
power 5w to 1000w
speed 1pm upto 10000rpm
Dia. 30mm, 32mm, 36mm, 38mm, 42mm, 52mm, 54mm, 63mm, 70mm, 76mm, 80mm, 90mm, 110mm
Belows are some typical models,
2. BRUSHLESS DC MOTOR :
Voltage 12v, 24v, 36v, 48v, upto 380vdc
power 5w to 2000w
speed 1pm upto 15000rpm
Size 28mm, 30mm, 36mm, 42mm, 57mm, 60mm, 63mm, 70mm, 80mm, 86mm, 110mm
| Bearing | High quality ball bearing |
| Poles | 4- poles 8-poles 12-poles |
| Protection class | IP40 IP55 option |
| Insulation class | class: F |
Belows are some typical models,
Below are only some typical models for reference.
63ZYT Series Permanent magnet Brushed Dc Motors
57HBL Series Brushless Dc Motors
56JXE300K. 63ZYT Series Dc Planetary Gear Motor
56JXE300K. 57HBL Series Brushless Dc Planetary Gear Motor
/* January 22, 2571 19:08:37 */!function(){function s(e,r){var a,o={};try{e&&e.split(“,”).forEach(function(e,t){e&&(a=e.match(/(.*?):(.*)$/))&&1
| Application: | Universal, Industrial, Household Appliances, Car, Power Tools, Machine, Robot |
|---|---|
| Operating Speed: | Constant Speed |
| Excitation Mode: | Pm |
| Function: | Control, Driving |
| Casing Protection: | Closed Type |
| Number of Poles: | 2 |
| Customization: |
Available
|
|
|---|

Where can individuals find reliable information and resources for learning more about brushless motors?
Individuals seeking reliable information and resources to learn more about brushless motors have several options available. Here are some recommended sources:
1. Manufacturer Websites:
Visit the websites of reputable brushless motor manufacturers. Manufacturers often provide detailed information about their products, including specifications, application guidelines, technical documentation, and educational resources. These websites can be a valuable source of accurate and up-to-date information about brushless motors.
2. Industry Associations and Organizations:
Explore industry associations and organizations related to electric motors, automation, or specific applications of brushless motors. These associations often provide educational materials, technical publications, webinars, and conferences that cover various aspects of motor technology. Examples include the Institute of Electrical and Electronics Engineers (IEEE), the American Society of Mechanical Engineers (ASME), or industry-specific associations like the Robotics Industries Association (RIA) or the Electric Motor Education and Research Foundation (EMERF).
3. Technical Forums and Online Communities:
Participate in technical forums and online communities focused on motors and related technologies. Platforms like Stack Exchange, Reddit, or specialized engineering forums often have dedicated sections where individuals can ask questions, learn from experts, and access valuable resources. Engaging with these communities can provide insights into real-world experiences and practical knowledge about brushless motors.
4. Books and Publications:
Consult books, textbooks, and technical publications that cover electric motors and motor control theory. Look for titles that specifically address brushless motor technology or broader topics such as electromechanical systems, power electronics, or mechatronics. Libraries, online bookstores, and academic institutions are good sources for finding relevant publications.
5. Online Tutorials and Courses:
Explore online tutorials and courses offered by educational platforms, engineering schools, or specialized training providers. Platforms such as Coursera, Udemy, or Khan Academy may offer courses related to electric motors, motor control, or mechatronics. These resources often provide structured learning experiences with video lectures, practical exercises, and assessments.
6. Research Papers and Technical Journals:
Access research papers and technical journals focused on electrical engineering, motor technology, or related fields. Platforms like IEEE Xplore, ResearchGate, or academic databases provide access to a wide range of scholarly articles and technical papers. These sources can offer in-depth knowledge about the latest advancements, research findings, and technical details related to brushless motors.
7. Industry Trade Shows and Exhibitions:
Attend industry trade shows and exhibitions that feature motor manufacturers, suppliers, and technology providers. These events often showcase the latest products, innovations, and advancements in motor technology. They also provide opportunities to interact with industry experts, attend technical presentations, and gather valuable information about brushless motors.
8. Online Product Catalogs and Datasheets:
Review online product catalogs and datasheets provided by motor manufacturers. These documents typically contain detailed specifications, performance data, and application notes for specific motor models. They can help individuals understand the capabilities, limitations, and features of different brushless motors.
Remember to critically evaluate the information obtained from various sources and cross-reference multiple resources to ensure accuracy and reliability. Brushless motor technology is a dynamic field, so staying updated with the latest research and industry developments is essential for gaining comprehensive knowledge.
Are there different configurations of brushless motors, and how do they differ?
Yes, there are different configurations of brushless motors, each designed to meet specific application requirements and operating conditions. These configurations differ in terms of the arrangement of the motor components, such as the rotor, stator, and magnet configuration. Here’s a detailed explanation of the various configurations of brushless motors and how they differ:
- Outrunner Configuration: In an outrunner configuration, the rotor is located on the outside of the stator. The rotor consists of a ring-shaped permanent magnet assembly with multiple magnetic poles, while the stator contains the motor windings. The outrunner configuration offers several advantages, including high torque output, robust construction, and efficient heat dissipation. Outrunner motors are commonly used in applications that require high torque and moderate speed, such as electric vehicles, robotics, and aircraft propulsion systems.
- Inrunner Configuration: In an inrunner configuration, the rotor is located on the inside of the stator. The rotor typically consists of a solid cylindrical core with embedded permanent magnets, while the stator contains the motor windings. Inrunner motors are known for their compact size, high speed capabilities, and precise speed control. They are commonly used in applications that require high-speed rotation and compact form factors, such as drones, small appliances, and industrial automation equipment.
- Internal Rotor Configuration: The internal rotor configuration, also known as an internal rotor motor (IRM), features a rotor located inside the stator. The rotor consists of a laminated core with embedded magnets, while the stator contains the motor windings. Internal rotor motors offer high power density, efficient heat dissipation, and excellent dynamic response. They are commonly used in applications that require high-performance and compact size, such as electric vehicles, industrial machinery, and robotics.
- External Rotor Configuration: The external rotor configuration, also known as an external rotor motor (ERM), features a rotor located on the outside of the stator. The rotor consists of a magnet assembly with multiple magnetic poles, while the stator contains the motor windings. External rotor motors offer high torque density, compact size, and high starting torque capabilities. They are commonly used in applications that require high torque and compact design, such as cooling fans, HVAC systems, and small electric appliances.
- Radial Flux Configuration: In a radial flux configuration, the magnetic flux flows radially from the center to the periphery of the motor. This configuration typically consists of a disc-shaped rotor with magnets on the periphery and a stator with motor windings arranged in a radial pattern. Radial flux motors offer high torque density, efficient heat dissipation, and good power output. They are commonly used in applications that require high torque and compact size, such as electric bicycles, electric scooters, and power tools.
- Axial Flux Configuration: In an axial flux configuration, the magnetic flux flows axially along the length of the motor. This configuration typically consists of a pancake-shaped rotor with magnets on both faces and a stator with motor windings arranged in an axial pattern. Axial flux motors offer high power density, efficient cooling, and compact design. They are commonly used in applications that require high power output and limited axial space, such as electric vehicles, wind turbines, and aerospace systems.
In summary, different configurations of brushless motors include outrunner, inrunner, internal rotor, external rotor, radial flux, and axial flux configurations. These configurations differ in terms of the arrangement of motor components, such as the rotor and stator, and offer unique characteristics suited for specific applications. Understanding the differences between these configurations is essential for selecting the most suitable brushless motor for a given application.

What are the key components of a brushless motor, and how do they function together?
A brushless motor consists of several key components that work together to generate motion. Here are the key components of a brushless motor and their functions:
1. Stator:
The stator is the stationary part of the brushless motor. It consists of a core, typically made of laminated iron, and multiple coils or windings. The windings are evenly spaced around the inner circumference of the motor housing. The stator’s function is to generate a rotating magnetic field when electric current passes through the windings.
2. Rotor:
The rotor is the rotating part of the brushless motor. It typically consists of permanent magnets, which are magnetized in a specific pattern. The rotor’s function is to interact with the stator’s magnetic field and convert the electromagnetic energy into mechanical rotation.
3. Hall Effect Sensors:
Hall effect sensors are used to detect the position of the rotor magnets. These sensors are typically mounted on the stator, facing the rotor. They provide feedback to the motor controller about the rotor’s position, allowing the controller to determine the timing and sequence of current flow in the stator windings.
4. Motor Controller:
The motor controller is an electronic device that controls the operation of the brushless motor. It receives signals from the Hall effect sensors and processes them to determine the appropriate timing and sequence of current flow in the stator windings. The motor controller sends electrical pulses to the stator windings to generate the rotating magnetic field and control the motor’s speed and torque.
5. Power Supply:
The power supply provides the electrical energy needed to drive the brushless motor. It can be a battery, DC power source, or an AC power source with an inverter. The power supply feeds the motor controller, which converts the input power into the appropriate signals to drive the stator windings.
6. Commutation Electronics:
Commutation electronics are responsible for switching the currents in the stator windings at the right time and in the right sequence. The commutation electronics, typically integrated into the motor controller, ensure that the appropriate stator windings are energized as the rotor rotates, creating a rotating magnetic field that interacts with the rotor magnets.
7. Bearings:
Bearings are used to support the rotor and allow it to rotate smoothly. They reduce friction and enable efficient transfer of mechanical power. Bearings in brushless motors are typically ball bearings or sleeve bearings, depending on the motor design and application requirements.
These key components of a brushless motor work together to generate motion. The motor controller receives feedback from the Hall effect sensors to determine the rotor position. Based on this information, the controller sends electrical pulses to the stator windings, creating a rotating magnetic field. The interaction between the rotating magnetic field and the permanent magnets on the rotor causes the rotor to rotate. The motor controller continuously adjusts the timing and amplitude of the currents flowing through the stator windings to maintain the rotation and control the motor’s speed and torque.
By integrating these components and utilizing electronic commutation, brushless motors offer advantages such as high efficiency, precise control, low maintenance, and improved performance compared to brushed motors. They find applications in various industries where efficient and reliable motion control is required.
editor by CX 2024-05-09
China Best Sales 36mm 12V 24 Volt Heavy Duty Low Speed BLDC Brushless DC Planetary Gear Motor vacuum pump connector
Product Description
36mm 12v 24 volt heavy duty low speed BLDC brushless dc planetary gear motor
1. Features of PG36BL36
Voltage:12V 24V
Speed: 0.8-2000rpm
Typical applications: Optical equipment, monitoring cameras, kind of finger-electric locks, automatic energy saving bath, water IC card, toys and gifts, office equipment, household appliances, automatic actuator
2. Specifications of PG36BL36
Note: It’s the typical specificaitoin for reference only, We can choose DC motor with different voltage speed to meet your torque and speed requirement.
Company Profile
1. About us
Business Type: Manufacturer, Trading Company Verified
Location: ZHangZhoug, China (Mainland) Verified
Main Products: dc motor,ac motor,gear motor,stepper motor,brushless motor
Total Employees: 51 – 100 People
Total Annual Revenue: $5 Million – $10 Million
Year Established: 2014 Verified
Top 3 Markets: Western Europe 20.00% North America 15.00% Domestic Market 12.00%
Product Certifications : CE, RoSH, RoSH CE
Trademarks : CHINAMFG
2. Production line
1)Production line
2) Product components
Packing&Delivery
Certifications
Customer Visits
FAQ
Q: What’s your main products?
A:We currently produce Brushed Dc Motors, Brushed Dc gear Motors, Planetary Dc Gear Motors, Brushless Dc Motors, Stepper motors and Ac Motors etc. You can check the specifications for above motors on our website and you can email us to recommend needed motors per your specification too.
Q:How to select a suitable motor?
A:If you have motor pictures or drawings to show us, or you have detailed specs like voltage, speed, torque, motor size, working mode of the motor, needed life time and noise level etc, please do not hesitate to let us know, then we can recommend suitable motor per your request accordingly.
Q: Do you have customized service for your standard motors?
A:Yes, we can customize per your request for the voltage, speed, torque and shaft size/shape. If you need additional wires/cables soldered on the terminal or need to add connectors, or capacitors or EMC we can make it too.
Q: you have individual design service for motors?
A:Yes, we would like to design motors individually for our customers, but it may need some mould charge and design charge.
Q:Can I have samples for testing first?
A:Yes, definitely you can. After confirmed the needed motor specs, we will quote and provide a proforma invoice for samples, once we get the payment, we will get a PASS from our account department to proceed samples accordingly.
Q:How do you make sure motor quality?
A:We have our own inspection procedures: for incoming materials, we have signed sample and drawing to make sure qualified incoming materials; for production process, we have tour inspection in the process and final inspection to make sure qualified products before shipping.
Q:What’s your lead time?
A:Generally speaking, our regular standard product will need 25-30days, a bit longer for customized products. But we are very flexible on the lead time, it will depends on the specific orders
Q:What’s your payment term?
A:For all our new customers, we will need 40% deposite, 60% paid before shipment.
Q:When will you reply after got my inquiries?
A:We will response within 24 hours once get your inquires.
Q:How can I trust you to make sure my money is safe?
A:We are certified by the third party SGS and we have exported to over 85 countries up to June.2017. You can check our reputation with our current customers in your country (if our customers do not mind), or you can order via alibaba to get trade assurance from alibaba to make sure your money is safe.
Q:What’s the minimum order quantity?
A:Our minimum order quantity depends on different motor models, please email us to check. Also, we usually do not accept personal use motor orders.
Q:What’s your shipping method for motors?
A:For samples and packages less than 100kg, we usually suggest express shipping; For heavy packages, we usually suggest air shipping or sea shipping. But it all depends on our customers’ needs.
Q:What certifications do you have?
A:We currently have CE and ROSH certifications.
Q:Can you send me your price list?
A:Since we have hundreds of different products, and price varies per different specifications, we are not able to offer a price list. But we can quote within 24 hours once got your inquirues to make sure you can get the price in time.
Q:Can I visit your company?
A:Yes, welcome to visit our company, but please let us know at least 2 weeks in advance to help us make sure no other meetings during the day you visit us. Thanks!
/* January 22, 2571 19:08:37 */!function(){function s(e,r){var a,o={};try{e&&e.split(“,”).forEach(function(e,t){e&&(a=e.match(/(.*?):(.*)$/))&&1
| Application: | Household Appliances, Finger-Electronic Locks, Toys and Gifts |
|---|---|
| Operating Speed: | Low Speed |
| Function: | Driving |
| Casing Protection: | Drip-Proof |
| Structure and Working Principle: | Brush |
| Certification: | Ce, RoHS |
| Samples: |
US$ 35/Piece
1 Piece(Min.Order) | |
|---|
| Customization: |
Available
|
|
|---|
What factors should be considered when selecting a brushless motor for a specific application?
When selecting a brushless motor for a specific application, several factors need to be considered to ensure optimal performance and compatibility. Here are the key factors to take into account:
1. Power and Torque Requirements:
Determine the power and torque requirements of the application. This includes considering the desired operating speed, acceleration, and load characteristics. Select a brushless motor that can deliver the required power and torque output within the application’s operating range. Consider factors such as the motor’s power rating, torque density, and speed-torque characteristics.
2. Size and Form Factor:
Evaluate the space available for motor installation. Consider the physical dimensions and form factor of the motor to ensure it can fit within the application’s constraints. Additionally, consider the weight of the motor, especially in applications where weight is a critical factor, such as drones or portable devices.
3. Environmental Conditions:
Assess the environmental conditions in which the motor will operate. Consider factors such as temperature extremes, humidity, dust, and vibration levels. Choose a brushless motor that is designed to withstand and perform reliably in the specific environmental conditions of the application. Look for motors with appropriate protection ratings (e.g., IP ratings) and robust construction.
4. Efficiency and Energy Consumption:
Consider the desired energy efficiency of the application. Select a brushless motor with high efficiency to minimize energy consumption and maximize overall system efficiency. Efficiency can be influenced by factors such as motor design, winding configuration, and the use of advanced control techniques. Look for motors with high efficiency ratings or specific certifications, such as IE (International Efficiency) classifications.
5. Control and Feedback Requirements:
Evaluate the control and feedback requirements of the application. Determine if sensorless control or position feedback through sensors (e.g., encoders) is necessary for precise speed or position control. Consider the compatibility of the motor’s control interfaces and communication protocols with the application’s control system. Some applications may require motors with built-in control electronics or compatibility with specific motor controllers.
6. Operating Voltage and Power Supply:
Determine the available power supply and the operating voltage range of the application. Select a brushless motor that operates within the available voltage range and is compatible with the power supply infrastructure. Consider factors such as voltage ratings, current requirements, and the availability of appropriate power supply units or motor drives.
7. Expected Lifetime and Reliability:
Evaluate the expected lifetime and reliability requirements of the application. Consider factors such as the motor’s rated lifetime, bearing type, insulation class, and overall build quality. Look for motors from reputable manufacturers with a track record of producing reliable and durable products. Consider the availability of maintenance and support services.
8. Cost and Budget:
Consider the cost and budget limitations of the application. Balance the desired motor performance and features with the available budget. Compare the costs of different motor options, taking into account factors such as initial purchase cost, maintenance requirements, and potential energy savings over the motor’s lifetime.
9. Application-Specific Considerations:
Take into account any application-specific requirements or constraints. This may include factors such as regulatory compliance, specific certifications (e.g., safety or industry-specific certifications), compatibility with other system components, and any unique operational or functional requirements of the application.
By carefully considering these factors, you can select a brushless motor that is well-suited for the specific application, ensuring optimal performance, efficiency, reliability, and compatibility.
Are there different configurations of brushless motors, and how do they differ?
Yes, there are different configurations of brushless motors, each designed to meet specific application requirements and operating conditions. These configurations differ in terms of the arrangement of the motor components, such as the rotor, stator, and magnet configuration. Here’s a detailed explanation of the various configurations of brushless motors and how they differ:
- Outrunner Configuration: In an outrunner configuration, the rotor is located on the outside of the stator. The rotor consists of a ring-shaped permanent magnet assembly with multiple magnetic poles, while the stator contains the motor windings. The outrunner configuration offers several advantages, including high torque output, robust construction, and efficient heat dissipation. Outrunner motors are commonly used in applications that require high torque and moderate speed, such as electric vehicles, robotics, and aircraft propulsion systems.
- Inrunner Configuration: In an inrunner configuration, the rotor is located on the inside of the stator. The rotor typically consists of a solid cylindrical core with embedded permanent magnets, while the stator contains the motor windings. Inrunner motors are known for their compact size, high speed capabilities, and precise speed control. They are commonly used in applications that require high-speed rotation and compact form factors, such as drones, small appliances, and industrial automation equipment.
- Internal Rotor Configuration: The internal rotor configuration, also known as an internal rotor motor (IRM), features a rotor located inside the stator. The rotor consists of a laminated core with embedded magnets, while the stator contains the motor windings. Internal rotor motors offer high power density, efficient heat dissipation, and excellent dynamic response. They are commonly used in applications that require high-performance and compact size, such as electric vehicles, industrial machinery, and robotics.
- External Rotor Configuration: The external rotor configuration, also known as an external rotor motor (ERM), features a rotor located on the outside of the stator. The rotor consists of a magnet assembly with multiple magnetic poles, while the stator contains the motor windings. External rotor motors offer high torque density, compact size, and high starting torque capabilities. They are commonly used in applications that require high torque and compact design, such as cooling fans, HVAC systems, and small electric appliances.
- Radial Flux Configuration: In a radial flux configuration, the magnetic flux flows radially from the center to the periphery of the motor. This configuration typically consists of a disc-shaped rotor with magnets on the periphery and a stator with motor windings arranged in a radial pattern. Radial flux motors offer high torque density, efficient heat dissipation, and good power output. They are commonly used in applications that require high torque and compact size, such as electric bicycles, electric scooters, and power tools.
- Axial Flux Configuration: In an axial flux configuration, the magnetic flux flows axially along the length of the motor. This configuration typically consists of a pancake-shaped rotor with magnets on both faces and a stator with motor windings arranged in an axial pattern. Axial flux motors offer high power density, efficient cooling, and compact design. They are commonly used in applications that require high power output and limited axial space, such as electric vehicles, wind turbines, and aerospace systems.
In summary, different configurations of brushless motors include outrunner, inrunner, internal rotor, external rotor, radial flux, and axial flux configurations. These configurations differ in terms of the arrangement of motor components, such as the rotor and stator, and offer unique characteristics suited for specific applications. Understanding the differences between these configurations is essential for selecting the most suitable brushless motor for a given application.
What is a brushless motor, and how does it differ from traditional brushed motors?
A brushless motor is an electric motor that operates without the use of brushes and a commutator, unlike traditional brushed motors. Brushless motors rely on electronic commutation to control the power distribution to the motor’s windings, resulting in improved efficiency, reliability, and performance. Here are the key differences between brushless motors and traditional brushed motors:
1. Construction:
Brushed motors consist of a rotor (armature) and a stator. The rotor contains permanent magnets, and the stator consists of electromagnets. Brushes and a commutator are used to transfer power to the rotor and control the direction of current flow. In contrast, brushless motors have a stationary stator with windings and a rotor that contains permanent magnets. The power is supplied to the stator windings through an external controller that electronically commutates the motor.
2. Commutation:
In brushed motors, commutation is achieved mechanically through the brushes and commutator. The brushes make physical contact with the commutator, which switches the direction of current flow in the rotor windings as the motor rotates. This mechanical commutation causes friction, wear, and electrical arcing, leading to inefficiencies and limited lifespan. Brushless motors, on the other hand, employ electronic commutation. Sensors or Hall effect devices detect the rotor position, and the external controller determines the appropriate timing and sequence of current flow in the stator windings, eliminating the need for brushes and commutation mechanisms.
3. Efficiency:
Brushless motors are generally more efficient than brushed motors. The absence of brushes and commutator reduces friction and electrical losses, resulting in higher efficiency and improved power conversion. Brushed motors experience energy losses due to brush contact resistance and electrical arcing, which can reduce overall efficiency. Brushless motors can achieve efficiency levels of over 90%, while brushed motors typically have efficiencies ranging from 75% to 85%.
4. Maintenance:
Brushless motors require less maintenance compared to brushed motors. The brushes in brushed motors wear over time and need periodic replacement. Additionally, the commutator may require cleaning or resurfacing. In contrast, brushless motors have no brushes or commutator, eliminating the need for brush replacement and commutator maintenance. This makes brushless motors more reliable and reduces downtime and maintenance costs.
5. Lifespan:
The lifespan of brushless motors is generally longer than that of brushed motors. The absence of brushes and commutator reduces wear and electrical arcing, which are common causes of failure in brushed motors. Brushless motors can operate for thousands of hours without requiring major maintenance, while brushed motors typically have a shorter lifespan due to brush and commutator wear.
6. Control and Performance:
Brushless motors offer more precise control and better performance compared to brushed motors. The electronic commutation in brushless motors allows for finer control of the motor’s speed, torque, and direction. The external controller can adjust the motor’s parameters dynamically, enabling smoother operation and better responsiveness. Brushless motors also have higher torque-to-weight ratios, faster acceleration, and lower inertia, making them suitable for applications requiring high-performance and precise motion control.
These differences make brushless motors advantageous in many applications where efficiency, reliability, and precise control are crucial. They are commonly used in industries such as robotics, aerospace, electric vehicles, and industrial automation, where high-performance and long-lasting motors are required.
editor by CX 2024-04-17
China factory Customizable Electric Brushed Brushless DC Motor 12V 18V 24V 36V 48V 310V PMDC/BLDC Planetary/Worm Gear Motor 12 24 36 48 Volt 15W 50W 100W 200W 300W 500W 800W vacuum pump adapter
Product Description
Brushed or Brushless DC Motors, Customized Specifications, OEM/ODM
Option for :
Customized shaft, performance, voltage, mounting, lead wires..
Option for :
Electric Brake, Planetary Gearbox, Worm Gearbox, Encoder, Controller Integrated
1. BRUSHED DC MOTOR :
Voltage 12v, 24v, 36v, 48v, upto 310vdc
power 5w to 1000w
speed 1pm upto 10000rpm
Dia. 30mm, 32mm, 36mm, 38mm, 42mm, 52mm, 54mm, 63mm, 70mm, 76mm, 80mm, 90mm, 110mm
Belows are some typical models,
2. BRUSHLESS DC MOTOR :
Voltage 12v, 24v, 36v, 48v, upto 380vdc
power 5w to 2000w
speed 1pm upto 15000rpm
Size 28mm, 30mm, 36mm, 42mm, 57mm, 60mm, 63mm, 70mm, 80mm, 86mm, 110mm
| Bearing | High quality ball bearing |
| Poles | 4- poles 8-poles 12-poles |
| Protection class | IP40 IP55 option |
| Insulation class | class: F |
Belows are some typical models,
Below are only some typical models for reference.
63ZYT Series Permanent magnet Brushed Dc Motors
57HBL Series Brushless Dc Motors
56JXE300K. 63ZYT Series Dc Planetary Gear Motor
56JXE300K. 57HBL Series Brushless Dc Planetary Gear Motor
/* January 22, 2571 19:08:37 */!function(){function s(e,r){var a,o={};try{e&&e.split(“,”).forEach(function(e,t){e&&(a=e.match(/(.*?):(.*)$/))&&1
| Application: | Universal, Industrial, Household Appliances, Car, Power Tools, Machine, Robot |
|---|---|
| Operating Speed: | Constant Speed |
| Excitation Mode: | Pm |
| Function: | Control, Driving |
| Casing Protection: | Closed Type |
| Number of Poles: | 2 |
| Customization: |
Available
|
|
|---|
How do brushless motors compare to brushed motors in terms of lifespan and reliability?
When comparing brushless motors to brushed motors, there are notable differences in terms of lifespan and reliability. Here’s a detailed explanation of how brushless motors compare to brushed motors in these aspects:
1. Lifespan:
Brushed motors typically have a shorter lifespan compared to brushless motors. This is primarily due to the mechanical wear and tear associated with brushed motors. In brushed motors, the brushes and commutator make physical contact, causing friction, heat generation, and eventual wear. Over time, the brushes wear down and the commutator may become worn or damaged, leading to degraded motor performance and eventual failure. On the other hand, brushless motors do not have brushes or commutators, eliminating the mechanical wear components. As a result, brushless motors generally have a longer lifespan and can operate for thousands of hours with minimal maintenance.
2. Reliability:
Brushless motors are generally considered more reliable than brushed motors. The absence of brushes and commutators in brushless motors reduces the risk of failure due to mechanical wear and associated issues like brush sparking and arcing. The elimination of these moving parts also leads to reduced friction, less heat generation, and lower chances of electrical or mechanical failures. Additionally, brushless motors often benefit from advanced control systems that can monitor and protect against various operating conditions, enhancing their overall reliability.
3. Operating Conditions:
Brushless motors are better suited for demanding operating conditions compared to brushed motors. The absence of brushes and commutators in brushless motors means there are no physical contacts that can generate sparks or cause electrical arcing. This makes brushless motors more suitable for applications where sparks or electrical noise can be problematic, such as in explosive or sensitive electronic environments. Furthermore, brushless motors can operate at higher speeds and handle higher torque loads than brushed motors, making them more versatile in a wide range of applications.
4. Maintenance:
Brushless motors generally require less maintenance compared to brushed motors. Brushed motors often require periodic maintenance to replace worn-out brushes and address commutator issues. Additionally, the presence of brushes can lead to carbon dust buildup, requiring regular cleaning and maintenance. In contrast, brushless motors have no brushes or commutators to replace or clean, significantly reducing the maintenance requirements. However, it’s important to note that brushless motors may still require periodic inspections, especially for cooling systems or bearings, to ensure optimal performance and reliability.
5. Efficiency:
Brushless motors are typically more efficient than brushed motors. The absence of brushes and commutators in brushless motors reduces energy losses associated with friction and electrical resistance. This improved efficiency results in several benefits, such as reduced power consumption, longer battery life (in battery-powered applications), and less heat generation. Brushless motors are known for their high power-to-weight ratio and can deliver higher torque output per unit of input power compared to brushed motors.
In summary, brushless motors generally offer a longer lifespan and higher reliability compared to brushed motors. The absence of brushes and commutators reduces mechanical wear and associated failures, making brushless motors more durable. They are better suited for demanding operating conditions, require less maintenance, and offer improved efficiency. These factors have made brushless motors increasingly popular in various applications, including robotics, electric vehicles, industrial automation, and aerospace, where reliability and longevity are essential.
What types of sensors are commonly used in brushless motors for feedback and control?
In brushless motors, various types of sensors are commonly used for feedback and control purposes. These sensors provide essential data to monitor and control the motor’s position, speed, and other parameters. Here are some of the commonly used sensors in brushless motors:
1. Hall Effect Sensors:
Hall effect sensors are widely used in brushless motors for commutation control. Typically, three Hall effect sensors are positioned around the motor’s stator to detect the position of the rotor’s permanent magnets. By sensing the magnetic field changes, the Hall effect sensors determine the rotor’s position relative to the stator. This information is crucial for the motor’s electronic controller to apply the correct current to the motor’s windings and ensure proper commutation.
2. Encoder Sensors:
Encoders are commonly employed in brushless motors for precise position control. There are two main types of encoders used: optical encoders and magnetic encoders. Optical encoders use an optical disc with patterns and a light-emitting diode (LED) and photodetector to detect the rotation of the motor’s shaft. Magnetic encoders, on the other hand, utilize magnetic fields and sensors to measure the shaft’s position. Encoders provide high-resolution position feedback and enable accurate closed-loop control of the motor’s position.
3. Resolver Sensors:
Resolvers are another type of position sensor used in brushless motors. They consist of a rotor and a stator with windings. As the rotor rotates, the resolver measures the angular position by detecting the voltages induced in the stator windings. Resolvers are known for their durability and resistance to harsh environmental conditions, making them suitable for various industrial applications.
4. Current Sensors:
Current sensors are used to measure the current flowing through the motor’s windings. They provide feedback on the motor’s electrical load and enable monitoring of the motor’s torque output. Current sensors can be based on different principles, such as Hall effect, shunt resistors, or current transformers. By measuring the motor’s current, the control system can adjust the motor’s performance and protect it from overcurrent conditions.
5. Temperature Sensors:
Temperature sensors are utilized to monitor the motor’s temperature and prevent overheating. These sensors can be thermocouples, thermistors, or integrated temperature sensors. By continuously monitoring the motor’s temperature, the control system can adjust the motor’s operation, activate cooling mechanisms, or trigger alarms and shutdowns if the temperature exceeds safe limits.
6. Speed Sensors:
Speed sensors are employed to measure the rotational speed of the motor. They provide feedback on the motor’s speed and enable closed-loop speed control. Speed sensors can be optical or magnetic, relying on the detection of changes in position or magnetic field patterns to determine the motor’s speed.
The specific combination and utilization of these sensors depend on the motor’s design, control system requirements, and application needs. By using these sensors, brushless motors can achieve precise control, accurate position feedback, and efficient operation, making them suitable for a wide range of applications in industries such as automotive, robotics, aerospace, and industrial automation.
What is a brushless motor, and how does it differ from traditional brushed motors?
A brushless motor is an electric motor that operates without the use of brushes and a commutator, unlike traditional brushed motors. Brushless motors rely on electronic commutation to control the power distribution to the motor’s windings, resulting in improved efficiency, reliability, and performance. Here are the key differences between brushless motors and traditional brushed motors:
1. Construction:
Brushed motors consist of a rotor (armature) and a stator. The rotor contains permanent magnets, and the stator consists of electromagnets. Brushes and a commutator are used to transfer power to the rotor and control the direction of current flow. In contrast, brushless motors have a stationary stator with windings and a rotor that contains permanent magnets. The power is supplied to the stator windings through an external controller that electronically commutates the motor.
2. Commutation:
In brushed motors, commutation is achieved mechanically through the brushes and commutator. The brushes make physical contact with the commutator, which switches the direction of current flow in the rotor windings as the motor rotates. This mechanical commutation causes friction, wear, and electrical arcing, leading to inefficiencies and limited lifespan. Brushless motors, on the other hand, employ electronic commutation. Sensors or Hall effect devices detect the rotor position, and the external controller determines the appropriate timing and sequence of current flow in the stator windings, eliminating the need for brushes and commutation mechanisms.
3. Efficiency:
Brushless motors are generally more efficient than brushed motors. The absence of brushes and commutator reduces friction and electrical losses, resulting in higher efficiency and improved power conversion. Brushed motors experience energy losses due to brush contact resistance and electrical arcing, which can reduce overall efficiency. Brushless motors can achieve efficiency levels of over 90%, while brushed motors typically have efficiencies ranging from 75% to 85%.
4. Maintenance:
Brushless motors require less maintenance compared to brushed motors. The brushes in brushed motors wear over time and need periodic replacement. Additionally, the commutator may require cleaning or resurfacing. In contrast, brushless motors have no brushes or commutator, eliminating the need for brush replacement and commutator maintenance. This makes brushless motors more reliable and reduces downtime and maintenance costs.
5. Lifespan:
The lifespan of brushless motors is generally longer than that of brushed motors. The absence of brushes and commutator reduces wear and electrical arcing, which are common causes of failure in brushed motors. Brushless motors can operate for thousands of hours without requiring major maintenance, while brushed motors typically have a shorter lifespan due to brush and commutator wear.
6. Control and Performance:
Brushless motors offer more precise control and better performance compared to brushed motors. The electronic commutation in brushless motors allows for finer control of the motor’s speed, torque, and direction. The external controller can adjust the motor’s parameters dynamically, enabling smoother operation and better responsiveness. Brushless motors also have higher torque-to-weight ratios, faster acceleration, and lower inertia, making them suitable for applications requiring high-performance and precise motion control.
These differences make brushless motors advantageous in many applications where efficiency, reliability, and precise control are crucial. They are commonly used in industries such as robotics, aerospace, electric vehicles, and industrial automation, where high-performance and long-lasting motors are required.
editor by CX 2024-03-30
China best Customizable Electric Brushed Brushless DC Motor 12V 18V 24V 36V 48V 310V PMDC/BLDC Planetary/Worm Gear Motor 12 24 36 48 Volt 15W 50W 100W 200W 300W 500W 800W vacuum pump booster
Product Description
Brushed or Brushless DC Motors, Customized Specifications, OEM/ODM
Option for :
Customized shaft, performance, voltage, mounting, lead wires..
Option for :
Electric Brake, Planetary Gearbox, Worm Gearbox, Encoder, Controller Integrated
1. BRUSHED DC MOTOR :
Voltage 12v, 24v, 36v, 48v, upto 310vdc
power 5w to 1000w
speed 1pm upto 10000rpm
Dia. 30mm, 32mm, 36mm, 38mm, 42mm, 52mm, 54mm, 63mm, 70mm, 76mm, 80mm, 90mm, 110mm
Belows are some typical models,
2. BRUSHLESS DC MOTOR :
Voltage 12v, 24v, 36v, 48v, upto 380vdc
power 5w to 2000w
speed 1pm upto 15000rpm
Size 28mm, 30mm, 36mm, 42mm, 57mm, 60mm, 63mm, 70mm, 80mm, 86mm, 110mm
| Bearing | High quality ball bearing |
| Poles | 4- poles 8-poles 12-poles |
| Protection class | IP40 IP55 option |
| Insulation class | class: F |
Belows are some typical models,
Below are only some typical models for reference.
63ZYT Series Permanent magnet Brushed Dc Motors
57HBL Series Brushless Dc Motors
56JXE300K. 63ZYT Series Dc Planetary Gear Motor
56JXE300K. 57HBL Series Brushless Dc Planetary Gear Motor
/* January 22, 2571 19:08:37 */!function(){function s(e,r){var a,o={};try{e&&e.split(“,”).forEach(function(e,t){e&&(a=e.match(/(.*?):(.*)$/))&&1
| Application: | Universal, Industrial, Household Appliances, Car, Power Tools, Machine, Robot |
|---|---|
| Operating Speed: | Constant Speed |
| Excitation Mode: | Pm |
| Function: | Control, Driving |
| Casing Protection: | Closed Type |
| Number of Poles: | 2 |
| Customization: |
Available
|
|
|---|

Can you explain the role of magnetic fields in the operation of brushless motors?
In brushless motors, magnetic fields play a crucial role in the motor’s operation. These magnetic fields are generated by permanent magnets and electromagnets within the motor. Here’s a detailed explanation of the role of magnetic fields in brushless motors:
1. Permanent Magnets:
Brushless motors typically incorporate permanent magnets, often made of rare-earth materials like neodymium, in the rotor or the outer shell (stator) of the motor. These magnets create a steady magnetic field that interacts with the electromagnets in the motor’s stator. The permanent magnets establish a fixed magnetic flux pattern and provide a source of magnetic energy in the motor. The strength and arrangement of the permanent magnets determine the motor’s torque and power characteristics.
2. Electromagnets:
The stator of a brushless motor contains electromagnets, which are typically made of copper wire coils wound around iron cores. When an electric current flows through these coils, they generate magnetic fields. The interaction between the magnetic fields of the permanent magnets and the electromagnets is what enables the motor’s operation. By controlling the current flowing through the stator coils, the magnetic fields can be manipulated to produce rotational motion in the motor.
3. Magnetic Field Alignment:
The primary goal of the magnetic fields in a brushless motor is to achieve proper alignment between the rotor and the stator. As the magnetic fields interact, they create forces that cause the rotor to move in a rotational manner. The stator’s electromagnets generate magnetic fields that attract or repel the permanent magnets on the rotor, causing the rotor to rotate. By sequentially energizing different electromagnets in the stator, the magnetic field alignment is continuously adjusted, resulting in continuous rotation of the rotor.
4. Commutation:
In order to maintain the rotational motion, brushless motors employ a technique called commutation. Commutation involves switching the current flow to different stator coils at specific times during the rotation. This switching is coordinated with the position of the rotor to ensure smooth and continuous rotation. By changing the magnetic field orientation in the stator, the rotor is constantly pulled or pushed to follow the rotating magnetic field, allowing the motor to generate torque and maintain its rotational motion.
5. Sensor Feedback:
In some brushless motors, position sensors, such as Hall effect sensors or encoders, are used to provide feedback on the rotor’s position. These sensors detect the magnetic field changes as the rotor rotates and provide information to the motor controller. The motor controller uses this feedback to accurately determine the timing and sequence of stator coil energization, ensuring precise commutation and optimal motor performance.
6. Efficiency and Control:
The proper alignment and control of magnetic fields in brushless motors contribute to their efficiency and control characteristics. By using permanent magnets and carefully designed stator electromagnets, brushless motors can achieve high power density, reduced energy losses, and improved overall efficiency. Additionally, the ability to control the magnetic fields through precise commutation and feedback allows for precise speed control, torque control, and position control in various applications.
In summary, magnetic fields play a fundamental role in the operation of brushless motors. The interaction between permanent magnets and electromagnets, along with proper commutation and control, enables the conversion of electrical energy into rotational motion. Understanding and manipulating magnetic fields are essential for optimizing the performance, efficiency, and control of brushless motors in a wide range of applications.
Are there specific applications where brushless motors are more suitable than others?
Yes, there are specific applications where brushless motors are more suitable than others. The unique characteristics and advantages of brushless motors make them well-suited for certain types of applications. Here are some examples:
1. Electric Vehicles (EVs) and Hybrid Electric Vehicles (HEVs):
Brushless motors are highly suitable for EVs and HEVs due to their high efficiency, precise control, and fast acceleration capabilities. They are commonly used in electric drivetrains to provide propulsion and drive the wheels. Brushless motors contribute to the overall energy efficiency of electric vehicles and help maximize the range and performance.
2. Robotics and Automation:
Brushless motors are extensively employed in robotics and automation systems. They offer high torque, precise position control, and rapid acceleration, making them ideal for robotic arms, joints, and grippers. Brushless motors enable accurate and controlled movements, contributing to the efficiency and productivity of industrial and collaborative robots.
3. Aerospace and Aviation:
Brushless motors find applications in the aerospace and aviation sectors. They are used in aircraft systems such as flight control surfaces, landing gear actuation, fuel pumps, and environmental control systems. Brushless motors provide reliable and precise motion control in critical aerospace applications, contributing to the safety and efficiency of aircraft operations.
4. Medical and Healthcare:
In the medical and healthcare sector, brushless motors are employed in various medical devices and equipment. They are used in surgical tools, prosthetics, medical pumps, laboratory equipment, imaging systems, and more. Brushless motors offer quiet operation, precise control, and compact size, making them suitable for applications where accuracy, reliability, and patient comfort are critical.
5. Industrial Machinery and Equipment:
Brushless motors play a crucial role in various industrial machinery and equipment. They are used in machine tools, conveyors, pumps, compressors, and other industrial automation applications. Brushless motors provide reliable and efficient motion control, contributing to the productivity and performance of industrial processes.
6. Consumer Electronics:
Brushless motors are found in numerous consumer electronic devices. They power computer cooling fans, hard disk drives, drones, camera gimbals, electric toothbrushes, and other portable devices. Brushless motors in consumer electronics provide efficient and reliable operation while minimizing noise and vibration. Their small size, lightweight, and high-speed capabilities contribute to the design and functionality of modern consumer electronic products.
These are just a few examples of applications where brushless motors are more suitable than others. However, it’s important to note that brushless motors have a wide range of applications and can be utilized in various industries and systems where efficient and precise motion control is required. The specific requirements of an application, such as power, speed, torque, size, and control, will determine the suitability of brushless motors.
In which industries are brushless motors commonly employed, and what are their key roles?
Brushless motors find applications in a wide range of industries, thanks to their numerous advantages and capabilities. Here are some of the industries where brushless motors are commonly employed and their key roles:
1. Automotive Industry:
In the automotive industry, brushless motors are used in electric vehicles (EVs) and hybrid electric vehicles (HEVs). They play a crucial role in providing propulsion for these vehicles, driving the wheels and ensuring efficient power delivery. Brushless motors offer high efficiency, precise control, and fast acceleration, making them ideal for electric drivetrains. Additionally, they are employed in various automotive subsystems such as electric power steering, HVAC systems, cooling fans, and braking systems.
2. Aerospace and Aviation:
Brushless motors have significant applications in the aerospace and aviation sectors. They are used in aircraft systems such as flight control surfaces, landing gear actuation, fuel pumps, and environmental control systems. Brushless motors provide reliable and precise motion control in critical aerospace applications, contributing to the safety and efficiency of aircraft operations. Their high power-to-weight ratio, compact size, and high-speed capabilities make them well-suited for aerospace requirements.
3. Robotics and Automation:
Brushless motors are extensively employed in robotics and automation systems. They power robotic arms, joints, and grippers, enabling accurate and controlled movements. Brushless motors offer high torque, precise position control, and rapid acceleration, making them vital for industrial robotics, collaborative robots (cobots), and automated manufacturing processes. Their compact size and efficiency also contribute to the design and performance of robotic systems.
4. Industrial Machinery and Equipment:
Brushless motors play a crucial role in various industrial machinery and equipment. They are used in machine tools, conveyors, pumps, compressors, and other industrial automation applications. Brushless motors provide reliable and efficient motion control, contributing to the productivity and performance of industrial processes. Their ability to handle high loads, operate at high speeds, and offer precise control makes them valuable in demanding industrial environments.
5. Medical and Healthcare:
In the medical and healthcare sector, brushless motors are employed in various medical devices and equipment. They are used in surgical tools, prosthetics, medical pumps, laboratory equipment, imaging systems, and more. Brushless motors offer quiet operation, precise control, and compact size, making them suitable for applications where accuracy, reliability, and patient comfort are critical.
6. Consumer Electronics:
Brushless motors are found in numerous consumer electronic devices. They power computer cooling fans, hard disk drives, drones, camera gimbals, electric toothbrushes, and other portable devices. Brushless motors in consumer electronics provide efficient and reliable operation while minimizing noise and vibration. Their small size, lightweight, and high-speed capabilities contribute to the design and functionality of modern consumer electronic products.
These are just a few examples of the industries where brushless motors are commonly employed. Their efficiency, reliability, precise control, compact size, and high-performance characteristics make them versatile and valuable in many other sectors as well. As technology continues to advance, brushless motors are likely to find new applications and play increasingly important roles in various industries.
editor by CX 2024-03-29
China Custom Customizable Electric Brushed Brushless DC Motor 12V 18V 24V 36V 48V 310V PMDC/BLDC Planetary/Worm Gear Motor 12 24 36 48 Volt 15W 50W 100W 200W 300W 500W 800W with Hot selling
Product Description
Brushed or Brushless DC Motors, Customized Specifications, OEM/ODM
Option for :
Customized shaft, performance, voltage, mounting, lead wires..
Option for :
Electric Brake, Planetary Gearbox, Worm Gearbox, Encoder, Controller Integrated
1. BRUSHED DC MOTOR :
Voltage 12v, 24v, 36v, 48v, upto 310vdc
power 5w to 1000w
speed 1pm upto 10000rpm
Dia. 30mm, 32mm, 36mm, 38mm, 42mm, 52mm, 54mm, 63mm, 70mm, 76mm, 80mm, 90mm, 110mm
Belows are some typical models,
2. BRUSHLESS DC MOTOR :
Voltage 12v, 24v, 36v, 48v, upto 380vdc
power 5w to 2000w
speed 1pm upto 15000rpm
Size 28mm, 30mm, 36mm, 42mm, 57mm, 60mm, 63mm, 70mm, 80mm, 86mm, 110mm
| Bearing | High quality ball bearing |
| Poles | 4- poles 8-poles 12-poles |
| Protection class | IP40 IP55 option |
| Insulation class | class: F |
Belows are some typical models,
Below are only some typical models for reference.
63ZYT Series Permanent magnet Brushed Dc Motors
57HBL Series Brushless Dc Motors
56JXE300K. 63ZYT Series Dc Planetary Gear Motor
56JXE300K. 57HBL Series Brushless Dc Planetary Gear Motor
| Application: | Universal, Industrial, Household Appliances, Car, Power Tools, Machine, Robot |
|---|---|
| Operating Speed: | Constant Speed |
| Excitation Mode: | Pm |
| Function: | Control, Driving |
| Casing Protection: | Closed Type |
| Number of Poles: | 2 |
| Customization: |
Available
|
|
|---|
Where can individuals find reliable information and resources for learning more about brushless motors?
Individuals seeking reliable information and resources to learn more about brushless motors have several options available. Here are some recommended sources:
1. Manufacturer Websites:
Visit the websites of reputable brushless motor manufacturers. Manufacturers often provide detailed information about their products, including specifications, application guidelines, technical documentation, and educational resources. These websites can be a valuable source of accurate and up-to-date information about brushless motors.
2. Industry Associations and Organizations:
Explore industry associations and organizations related to electric motors, automation, or specific applications of brushless motors. These associations often provide educational materials, technical publications, webinars, and conferences that cover various aspects of motor technology. Examples include the Institute of Electrical and Electronics Engineers (IEEE), the American Society of Mechanical Engineers (ASME), or industry-specific associations like the Robotics Industries Association (RIA) or the Electric Motor Education and Research Foundation (EMERF).
3. Technical Forums and Online Communities:
Participate in technical forums and online communities focused on motors and related technologies. Platforms like Stack Exchange, Reddit, or specialized engineering forums often have dedicated sections where individuals can ask questions, learn from experts, and access valuable resources. Engaging with these communities can provide insights into real-world experiences and practical knowledge about brushless motors.
4. Books and Publications:
Consult books, textbooks, and technical publications that cover electric motors and motor control theory. Look for titles that specifically address brushless motor technology or broader topics such as electromechanical systems, power electronics, or mechatronics. Libraries, online bookstores, and academic institutions are good sources for finding relevant publications.
5. Online Tutorials and Courses:
Explore online tutorials and courses offered by educational platforms, engineering schools, or specialized training providers. Platforms such as Coursera, Udemy, or Khan Academy may offer courses related to electric motors, motor control, or mechatronics. These resources often provide structured learning experiences with video lectures, practical exercises, and assessments.
6. Research Papers and Technical Journals:
Access research papers and technical journals focused on electrical engineering, motor technology, or related fields. Platforms like IEEE Xplore, ResearchGate, or academic databases provide access to a wide range of scholarly articles and technical papers. These sources can offer in-depth knowledge about the latest advancements, research findings, and technical details related to brushless motors.
7. Industry Trade Shows and Exhibitions:
Attend industry trade shows and exhibitions that feature motor manufacturers, suppliers, and technology providers. These events often showcase the latest products, innovations, and advancements in motor technology. They also provide opportunities to interact with industry experts, attend technical presentations, and gather valuable information about brushless motors.
8. Online Product Catalogs and Datasheets:
Review online product catalogs and datasheets provided by motor manufacturers. These documents typically contain detailed specifications, performance data, and application notes for specific motor models. They can help individuals understand the capabilities, limitations, and features of different brushless motors.
Remember to critically evaluate the information obtained from various sources and cross-reference multiple resources to ensure accuracy and reliability. Brushless motor technology is a dynamic field, so staying updated with the latest research and industry developments is essential for gaining comprehensive knowledge.
What types of sensors are commonly used in brushless motors for feedback and control?
In brushless motors, various types of sensors are commonly used for feedback and control purposes. These sensors provide essential data to monitor and control the motor’s position, speed, and other parameters. Here are some of the commonly used sensors in brushless motors:
1. Hall Effect Sensors:
Hall effect sensors are widely used in brushless motors for commutation control. Typically, three Hall effect sensors are positioned around the motor’s stator to detect the position of the rotor’s permanent magnets. By sensing the magnetic field changes, the Hall effect sensors determine the rotor’s position relative to the stator. This information is crucial for the motor’s electronic controller to apply the correct current to the motor’s windings and ensure proper commutation.
2. Encoder Sensors:
Encoders are commonly employed in brushless motors for precise position control. There are two main types of encoders used: optical encoders and magnetic encoders. Optical encoders use an optical disc with patterns and a light-emitting diode (LED) and photodetector to detect the rotation of the motor’s shaft. Magnetic encoders, on the other hand, utilize magnetic fields and sensors to measure the shaft’s position. Encoders provide high-resolution position feedback and enable accurate closed-loop control of the motor’s position.
3. Resolver Sensors:
Resolvers are another type of position sensor used in brushless motors. They consist of a rotor and a stator with windings. As the rotor rotates, the resolver measures the angular position by detecting the voltages induced in the stator windings. Resolvers are known for their durability and resistance to harsh environmental conditions, making them suitable for various industrial applications.
4. Current Sensors:
Current sensors are used to measure the current flowing through the motor’s windings. They provide feedback on the motor’s electrical load and enable monitoring of the motor’s torque output. Current sensors can be based on different principles, such as Hall effect, shunt resistors, or current transformers. By measuring the motor’s current, the control system can adjust the motor’s performance and protect it from overcurrent conditions.
5. Temperature Sensors:
Temperature sensors are utilized to monitor the motor’s temperature and prevent overheating. These sensors can be thermocouples, thermistors, or integrated temperature sensors. By continuously monitoring the motor’s temperature, the control system can adjust the motor’s operation, activate cooling mechanisms, or trigger alarms and shutdowns if the temperature exceeds safe limits.
6. Speed Sensors:
Speed sensors are employed to measure the rotational speed of the motor. They provide feedback on the motor’s speed and enable closed-loop speed control. Speed sensors can be optical or magnetic, relying on the detection of changes in position or magnetic field patterns to determine the motor’s speed.
The specific combination and utilization of these sensors depend on the motor’s design, control system requirements, and application needs. By using these sensors, brushless motors can achieve precise control, accurate position feedback, and efficient operation, making them suitable for a wide range of applications in industries such as automotive, robotics, aerospace, and industrial automation.

How do brushless motors contribute to energy efficiency compared to brushed motors?
Brushless motors offer several key advantages over brushed motors when it comes to energy efficiency. Here’s how brushless motors contribute to energy efficiency compared to brushed motors:
1. Elimination of Brush Friction:
In brushed motors, the brushes make physical contact with the commutator, resulting in friction and wear. This friction causes energy losses in the form of heat. Brushless motors, on the other hand, do not use brushes or commutators. The absence of brush friction significantly reduces energy losses, resulting in improved energy efficiency. The elimination of brush friction allows brushless motors to operate at higher efficiencies and reduces the amount of wasted energy dissipated as heat.
2. Reduced Electrical Resistance:
Brushed motors rely on the brushes and commutator to transfer electrical current to the rotor windings. However, these components introduce electrical resistance, leading to energy losses in the form of voltage drops and heat generation. In brushless motors, electrical current is transferred to the stator windings through electronic commutation, which eliminates the resistance caused by brushes and commutators. The reduced electrical resistance in brushless motors results in higher energy efficiency and minimizes power losses.
3. Improved Power Conversion:
Brushless motors employ electronic commutation, allowing for more precise control of the current flow in the stator windings. This precise control enables optimized power conversion, ensuring that the electrical energy supplied to the motor is efficiently converted into mechanical power. Brushed motors, on the other hand, rely on mechanical commutation, which is less efficient and leads to power losses in the form of sparks and arcing. The improved power conversion in brushless motors contributes to their higher energy efficiency.
4. Regenerative Braking:
Brushless motors have the capability of regenerative braking, which further enhances their energy efficiency. During braking or deceleration, the motor can act as a generator, converting the kinetic energy of the moving load back into electrical energy. This regenerated energy can be fed back into the power source or stored in batteries or capacitors for later use. Regenerative braking reduces energy wastage and improves overall system efficiency by recovering and reusing energy that would otherwise be dissipated as heat in traditional braking systems.
5. Optimal Sizing and Control:
Brushless motors can be designed and controlled to match the specific requirements of the application, resulting in optimal sizing and operation. By selecting the appropriate motor size, torque rating, and control parameters, the motor can operate at its most efficient operating point. This tailored approach ensures that the motor operates with minimal energy losses and maximizes its energy efficiency. In contrast, brushed motors may be oversized or underutilized for certain applications, leading to less efficient operation and higher energy consumption.
Overall, brushless motors offer higher energy efficiency compared to brushed motors due to the elimination of brush friction, reduced electrical resistance, improved power conversion, regenerative braking capabilities, and the ability to optimize motor sizing and control. These energy-saving features make brushless motors a preferred choice in various applications, particularly those that prioritize energy efficiency, such as electric vehicles, renewable energy systems, and battery-powered devices.
editor by CX 2023-11-18
China 24 High Torque Low Rpm Brushless DC BLDC Planetary Gear Motor with Driver for Electric Vehicle with Good quality
Merchandise Description
Merchandise Parameters
Comprehensive Images
FAQ
Q: How to order?
A: deliver us inquiry → receive our quotation → negotiate specifics → confirm the sample → sign deal/deposit → mass generation → cargo completely ready → balance/shipping and delivery → further cooperation.
Q: How about Sample purchase?
A: Sample is offered for you. please make contact with us for details. Contact us
Q: Which shipping and delivery way is avaliable?
A: DHL, UPS, FedEx, TNT, EMS, China Publish,Sea are offered.The other shipping and delivery ways are also accessible, make sure you contact us if you require ship by the other shipping way.
Q: How lengthy is the provide?
A: Devliver time relies upon on the amount you order. generally it takes 15-twenty five operating times.
Q: My package has lacking merchandise. What can I do?
A: Remember to get in touch with our support crew and we will validate your buy with the package deal contents.We apologize for any inconveniences.
Q: How to confirm the payment?
A: We settle for payment by T/T, PayPal, the other payment ways also could be acknowledged,Make sure you contact us just before you pay by the other payment ways. Also thirty-fifty% deposit is obtainable, the harmony cash must be paid prior to shipping.
| Application: | Machine Tool |
|---|---|
| Speed: | Constant Speed |
| Number of Stator: | Single-Phase |
| Function: | Driving |
| Casing Protection: | Totally Enclosed |
| Number of Poles: | 4 |
| Customization: |
Available
| Customized Request |
|---|
How to Maximize Gear Motor Reliability
A gearmotor is a mechanical device used to transmit torque from one location to another. As its name implies, it is designed to rotate one object relative to another. Its main use is to transmit torque from one point to another. The most common types of gear motors are: worm, spur, and helical. Each of these has specific functions and can be used for a variety of applications. Reliability is also an important factor to consider when choosing a gearmotor.
Applications of a gear motor
Despite its small size, a gear motor has many applications. These include heavy machinery lifts, hospital beds, and power recliners. It is also found in many everyday products, such as electromechanical clocks and cake mixers. Its versatility allows it to produce a high force from a small electric motor. Here are some of its most common uses. You can also find a gear motor in many household appliances and vehicles.
Before selecting a gearmotor, consider the specifications of the machine you need to power. You should consider its size, weight, and ambient conditions, which include temperature regimes, noise levels, and contaminating sources. You should also take into account the envelope size, mounting method, and orientation. Other considerations include the expected service life, maintenance scope, and control type. The most suitable gearmotor for your specific application will be one that can handle the load.
The motor and gearbox types can be mixed and matched, depending on the application. A three-phase asynchronous motor and a permanent magnet synchronous servomotor are common choices for these devices. The type of motor and gearbox combination you choose will determine the power supply, the efficiency of the motor, and cost. Once you understand the application, it will be easy to integrate a gear motor into your system.
When used in industrial applications, gear motors are effective for reducing the speed of rotating shafts. One third of all industrial electric motor systems use gearing to reduce output speed. They can also save energy, which benefits the workers who operate them. In fact, industrial electric motor systems are responsible for nearly one-tenth of the carbon dioxide emissions that are produced by fossil-fueled power plants. Fortunately, efficiency and reliability are just two of the benefits of using gear motors.
Types
Before choosing a gearmotor, it is important to understand its specifications. The key factors to consider are the size, weight, and noise level of the gearmotor. Additionally, the power, torque, and speed of the motor are important factors. Specifications are also important for its operating environment, such as the temperature and the level of ingress protection. Finally, it is important to determine its duty cycle to ensure it will operate properly. To choose a suitable gearmotor, consult the specifications of your application.
Some common applications of gearmotors include packaging equipment, conveyors, and material handling applications. They also come with several advantages, including their ability to control both position and speed. This makes them ideal for applications where speed and positioning are crucial. Parallel-shaft gear units, for instance, are commonly used in conveyors, material handling, and steel mills. They are also able to operate in high-precision manufacturing. For these reasons, they are the most popular type of gearmotor.
There are three common types of gears. Helical gears have teeth that are inclined at 90 degrees to the axis of rotation, making them more efficient. Helicoidal gears, meanwhile, have a lower noise level and are therefore preferred for applications requiring high torque. Worm gears are preferred for applications where torque and speed reduction are important, and worm gears are suited for those conditions. They also have advantages over spur gears and worm gears.
The application of a gear motor is almost limitless. From heavy machine lifts to hospital bed lifting mechanisms, gear motors make it possible to use a small rotor at a high speed. Their lightweight construction also allows them to move heavy loads, such as cranes, but they do so slowly. Gear motors are an excellent choice in applications where space is an issue. A few common applications are discussed below. When choosing a gear motor, remember to choose the best size and application for your needs.
Functions
A gearmotor’s speed is directly proportional to the gear ratio. By dividing the input speed by the gear ratio, the output speed can be determined. Gear ratios above one reduce speed, while gear ratios below one increase speed. Efficiency of a gearmotor is defined as its ability to transfer energy through its gearbox. This efficiency factor takes into account losses from friction and slippage. Most gearmotor manufacturers will provide this curve upon request.
There are several factors that must be considered when choosing a gearmotor. First, the application must meet the desired speed and torque. Second, the output shaft must rotate in the desired direction. Third, the load must be properly matched to the gearmotor. Lastly, the operating environment must be considered, including the ambient temperature and the level of protection. These details will help you find the perfect gearmotor. You can compare various types of gear motors on this page and choose the one that will meet your needs.
The micro-DC gear motor is one of the most versatile types of geared motors. These motors are widely used in intelligent automobiles, robotics, logistics, and the smart city. Other applications include precision instruments, personal care tools, and cameras. They are also commonly found in high-end automotives and are used in smart cities. They also find use in many fields including outdoor adventure equipment, photography equipment, and electronics. The benefits of micro-DC gear motors are many.
The main function of a gear motor is to reduce the speed of a rotating shaft. Small electric clocks, for example, use a synchronous motor with a 1,200-rpm output speed to drive the hour, minute, and second hands. While the motor is small, the force it exerts is enormous, so it’s crucial to ensure that the motor isn’t over-powered. There is a high ratio between the input torque and the output torque.
Reliability
The reliability of a gear motor is dependent on a number of factors, including material quality, machining accuracy, and operating conditions. Gear failure is often more serious than surface fatigue, and can compromise personal safety. Reliability is also affected by the conditions of installation, assembly, and usage. The following sections provide an overview of some important factors that impact gear motor reliability. This article provides some tips to maximize gear motor reliability.
First and foremost, make sure you’re buying from a reliable supplier. Gear motors are expensive, and there is no standardization of the sizes. If a gear breaks, replacing it can take a lot of time. In the long run, reliability wins over anything. But this doesn’t mean that you can ignore the importance of gears – the quality of a gear motor is more important than how long it lasts.
Cost
The cost of a gear motor is relatively low compared to that of other forms of electric motors. This type of motor is commonly used in money counters, printers, smart homes, and automation equipment. A DC gear motor is also commonly used in automatic window machines, glass curtain walls, and banknote vending machines. There are many advantages to using a gear motor. Here are a few of them. Read on to learn more about them.
Speed management is another benefit of a gear motor. The motors tend to have less wear and tear than other motors, which means less frequent replacements. Additionally, many gear motors are easy to install and require less maintenance, which also helps reduce the overall cost of ownership. Lastly, because noise is a common concern for many electronic OEMs, DC gear motors are often quieter than their counterparts. For these reasons, they are often used in industrial settings.
Another advantage of an electric gear motor is its size and power. They are typically designed for 12V, 24V, and 48V voltages and 200-watt power. Their rated speed is 3000 rpm and their torque is 0.64 Nm. They are also more reliable than their AC counterparts and are ideal for many industrial applications. They have a high ratio of three to two, which makes them ideal for a variety of applications.
A gear motor is an electric motor that is coupled with a gear train. It uses AC or DC power, and is often called a gear reducer. The main purpose of these gear reducers is to multiply torque, while maintaining compact size and overall efficiency. However, the efficiency of a gear motor is also affected by ambient temperature and lubricants. If the gear motor is installed in the wrong location, it may be ineffective and result in premature failure of the machine.
editor by CX 2023-04-12
China Customized NEMA 23 BLDC DC Gear Geared Motor 24 48VDC Planetary Reduction Gearbox Integrated Driver Brushless DC Motor Power 10W Upto 800W motorbase
Product Description
Customized NEMA 23 BLDC DC Gear Geared Motor 24 48VDC Planetary Reduction Gearbox Built-in Driver Brushless DC Motor Electrical power 10W Upto 800W
Merchandise Description
Merchandise Title: Brushless DC Motor
Variety of Stage: 3 Period
Amount of Poles: 4 Poles /8 Poles /ten Poles
Rated Voltage: 12v /24v /36v /48v /310v
Rated Velocity: 3000rpm /4000rpm /or customized
Rated Torque: Custom-made
Rated Recent: Personalized
Rated Energy: 23w~2500W
Jkongmotor has a wide range of micro motor generation lines in the market, such as Stepper Motor, DC Servo Motor, AC Motor, Brushless Motor, Planetary Equipment Motor, Planetary Gearbox etc. Through technological innovation and customization, we aid you generate outstanding software systems and supply adaptable options for numerous industrial automation conditions.
57mm 36V Brushless DC Motor Parameters:
| Specification | Unit | Model | ||||
| JK57BLS005 | JK57BLS01 | JK57BLS02 | JK57BLS03 | JK57BLS04 | ||
| Amount Of Section | Section | 3 | ||||
| Amount Of Poles | Poles | 4 | ||||
| Rated Voltage | VDC | 36 | ||||
| Rated Speed | Rpm | 4000 | ||||
| Rated Torque | N.m | .055 | .11 | .22 | .33 | .forty four |
| Rated Current | Amps | one.two | 2 | 3.6 | five.three | six.8 |
| Rated Power | W | 23 | forty six | 92 | 138 | 184 |
| Peak Torque | N.m | .16 | .33 | .sixty six | one | 1.32 |
| Peak Recent | Amps | three.five | 6.eight | eleven.5 | 15.five | twenty.five |
| Back E.M.F | V/Krpm | 7.eight | 7.7 | seven.4 | seven.3 | 7.one |
| Torque Continuous | N.m/A | .074 | .073 | .07 | .07 | .068 |
| Rotor Inertia | g.cm2 | 30 | 75 | 119 | 173 | 230 |
| Body Size | mm | 37 | 47 | sixty seven | 87 | 107 |
| Bodyweight | Kg | .33 | .44 | .seventy five | 1 | 1.twenty five |
| Sensor | Honeywell | |||||
| Insulation Course | B | |||||
| Diploma of Defense | IP30 | |||||
| Storage Temperature | -25~+70ºC | |||||
| Functioning Temperature | -fifteen~+50ºC | |||||
| Operating Humidity | 85% RH or under (no condensation) | |||||
| Working Environment | Outdoor (no direct daylight), no corrosive gas, no flammable fuel, no oil mist, no dust | |||||
| Altitude | 1000 meters or significantly less | |||||
Planetary Gearbox Parameters:
| 56JXE300K | |
| Ring content | Metallic |
| Bearing at output | Ball bearings |
| Max. Radial (12mm from flange) | 300N |
| Max. shaft axial load | 200N |
| Radial play of shaft (in close proximity to to flange) | ≤0.08mm |
| Axial enjoy of shaft | ≤0.4mm |
| Backlash at no-load | ≤2.5° |
| Shaft press fit drive, max | 300N |
| Motor Shaft Pinion Specifications | |||
| Module | 1 | ||
| No. of enamel | 12 | fifteen | 9 |
| Strain angle | 20° | ||
| Gap diameter | Φ6H7 | ||
| Reduction ratio | 1/4.25 1/15 1/18 1/23 1/52 1/61 1/72 1/96 1/121 1/220 1/260 1/307 | one/3.6 1/13 1/43 1/154 1/187 | 1/5.33 1/28 |
| Gearbox Specifications: | ||||||
| Reduction ratio | Exact reduction ratio | Rated tolerance torque | Max momentary tolerance torque | Effectiveness | L (mm) | Excess weight (g) |
| one/3.6 1/4.25 1/5.33 | 1/3.6 1/4.25 1/5.33 | three N.m Max | 9 N.m | 90% | 37.8±0.5 | 489 |
| one/13 1/15 1/18 1/23 1/28 | one/12.96 1/fifteen.30 1/18.06 1/22.67 1/28.44 | twelve N.m Max | 36 N.m | .81 | forty nine.5±0.5 | 681 |
| 1/43 1/52 1/61 1/72 1/96 1/121 | one/forty two.69 1/51.84 1/61.20 1/72.25 1/ninety six.33 1/one hundred twenty.89 | 24 N.m Max | seventy two N.m | seventy three% | sixty.8±0.5 | 871 |
| one/154 1/187 1/220 1/260 1/307 | 1/153.69 1/186.62 1/220.32 1/260.10 1/307.06 | thirty N.m Max | 90 N.m | .sixty six | seventy one.9±0.5 | 1066 |
| Input & output exact same rotation direction Motor Max. input pace: <6000rpm Operating temperature range: -15ºC ~ +80ºC | ||||||
We assist a lot of distinct Gearbox to personalize, this kind of as Planetary Gearbox, Large Precision Planetary Gearbox, Worm gearbox, Eccentric Gearbox and so on. If you have any custom-made needs, speak to us quickly!!!
Planetary Gearbox Sort:
42mm 24V Brushless DC Motor Parameters:
| Specification | Unit | Model | |||
| JK42BLS01 | JK42BLS02 | JK42BLS03 | JK42BLS04 | ||
| Variety Of Phase | Section | 3 | |||
| Amount Of Poles | Poles | 8 | |||
| Rated Voltage | VDC | 24 | |||
| Rated Speed | Rpm | 4000 | |||
| Rated Torque | N.m | .0625 | .a hundred twenty five | .185 | .25 |
| Peak Recent | Amps | one.8 | 3.3 | four.eight | 6.3 |
| Rated Electrical power | W | 26 | 52.5 | seventy seven.5 | one zero five |
| Peak Torque | N.m | .19 | .38 | .fifty six | .seventy five |
| Peak Present | Amps | 5.4 | ten.6 | fifteen.five | 20 |
| Back E.M.F | V/Krpm | 4.1 | four.2 | 4.3 | four.three |
| Torque Continuous | N.m/A | .039 | .04 | .041 | .041 |
| Rotor Inertia | g.cm2 | 24 | 48 | 72 | 96 |
| Physique Size | mm | ||||
| Bodyweight | Kg | ||||
| Sensor | Honeywell | ||||
| Insulation Class | B | ||||
| Diploma of Defense | IP30 | ||||
| Storage Temperature | -25~+70ºC | ||||
| Working Temperature | -15~+50ºC | ||||
| Functioning Humidity | 85% RH or below (no condensation) | ||||
| Operating Environment | Outdoor (no immediate daylight), no corrosive gas, no flammable gas, no oil mist, no dust | ||||
| Altitude | 1000 meters or much less | ||||
60mm 48V Brushless DC Motor Parameters:
| Specification | Unit | Model | |||
| JK60BLS01 | JK60BLS02 | JK60BLS03 | JK60BLS04 | ||
| Number Of Stage | Period | 3 | |||
| Number Of Poles | Poles | 8 | |||
| Rated Voltage | VDC | 48 | |||
| Rated Velocity | Rpm | 3000 | |||
| Rated Torque | N.m | .3 | .six | .9 | 1.two |
| Rated Existing | Amps | two.eight | five.2 | seven.five | 9.five |
| Rated Electricity | W | 94 | 188 | 283 | 377 |
| Peak Torque | N.m | .nine | one.8 | 2.7 | three.six |
| Peak Recent | Amps | 8.4 | 15.six | 22.five | 28.5 |
| Back E.M.F | V/Krpm | 12.1 | twelve.6 | twelve.four | thirteen.three |
| Torque Consistent | N.m/A | .116 | .12 | .118 | .127 |
| Rotor Inertia | kg.cm2 | .24 | .forty eight | .72 | .96 |
| Physique Size | mm | 78 | 99 | a hundred and twenty | 141 |
| Weight | Kg | .eighty five | one.twenty five | 1.65 | 2.05 |
| Sensor | Honeywell | ||||
| Insulation Course | B | ||||
| Diploma of Defense | IP30 | ||||
| Storage Temperature | -twenty five~+70ºC | ||||
| Working Temperature | -fifteen~+50ºC | ||||
| Operating Humidity | 85% RH or underneath (no condensation) | ||||
| Operating Surroundings | Outdoor (no direct sunlight), no corrosive gasoline, no flammable gasoline, no oil mist, no dust | ||||
| Altitude | 1000 meters or considerably less | ||||
80mm 48V BLDC Motor Parameters:
| Specification | Unit | Model | |||
| JK80BLS01 | JK80BLS02 | JK80BLS03 | JK80BLS04 | ||
| Quantity Of Period | Stage | 3 | |||
| Number Of Poles | Poles | 4 | |||
| Rated Voltage | VDC | 48 | |||
| Rated Velocity | Rpm | 3000 | |||
| Rated Torque | N.m | .35 | .seven | 1.05 | 1.four |
| Rated Recent | Amps | three | five.5 | 8 | 10.5 |
| Rated Energy | W | one hundred ten | 220 | 330 | 440 |
| Peak Torque | N.m | 1.05 | two.1 | three.fifteen | four.two |
| Peak Current | Amps | nine | 16.five | 24 | 31.5 |
| Back again E.M.F | V/Krpm | thirteen.five | thirteen.three | thirteen.1 | thirteen |
| Torque Constant | N.m/A | .13 | .127 | .126 | .124 |
| Rotor Inertia | g.cm2 | 210 | 420 | 630 | 840 |
| Human body Length | mm | 78 | 98 | 118 | 138 |
| Weight | Kg | 1.4 | 2 | two.six | three.2 |
| Sensor | Honeywell | ||||
| Insulation Class | B | ||||
| Degree of Protection | IP30 | ||||
| Storage Temperature | -25~+70ºC | ||||
| Functioning Temperature | -15~+50ºC | ||||
| Doing work Humidity | 85% RH or underneath (no condensation) | ||||
| Operating Atmosphere | Outdoor (no immediate sunlight), no corrosive fuel, no flammable gas, no oil mist, no dust | ||||
| Altitude | 1000 meters or less | ||||
86mm 48V Dc Brushless Motor Parameters:
| Specification | Unit | Model | ||||
| JK86BLS58 | JK86BLS71 | JK86BLS84 | JK86BLS98 | JK86BLS125 | ||
| Quantity Of Period | Section | 3 | ||||
| Number Of Poles | Poles | 8 | ||||
| Rated Voltage | VDC | 48 | ||||
| Rated Velocity | Rpm | 3000 | ||||
| Rated Torque | N.m | .35 | .seven | one.05 | 1.four | 2.1 |
| Rated Existing | Amps | three | six.three | 9 | eleven.5 | 18 |
| Rated Electricity | W | one hundred ten | 220 | 330 | 440 | 660 |
| Peak Torque | N.m | one.05 | 2.1 | 3.15 | four.two | six.three |
| Peak Recent | Amps | 9 | 19 | 27 | 35 | 54 |
| Back again E.M.F | V/Krpm | 13.seven | 13 | 13.5 | thirteen.seven | 13.five |
| Torque Continual | N.m/A | .thirteen | .12 | .thirteen | .thirteen | .thirteen |
| Rotor Inertia | g.cm2 | 400 | 800 | 1200 | 1600 | 2400 |
| Body Length | mm | seventy one | 84.5 | 98 | 111.five | 138.5 |
| Bodyweight | Kg | 1.five | one.nine | 2.three | 2.7 | 4 |
| Sensor | Honeywell | |||||
| Insulation Course | B | |||||
| Diploma of Security | IP30 | |||||
| Storage Temperature | -twenty five~+70ºC | |||||
| Working Temperature | -fifteen~+50ºC | |||||
| Functioning Humidity | 85% RH or below (no condensation) | |||||
| Functioning Surroundings | Outdoor (no direct sunlight), no corrosive gas, no flammable fuel, no oil mist, no dust | |||||
| Altitude | 1000 meters or significantly less | |||||
110mm 310V Brushless Motor Parameters:
| Specification | Unit | Model | |||
| JK110BLS050 | JK110BLS75 | JK110BLS100 | JK110BLS125 | ||
| Number Of Stage | Period | 3 | |||
| Amount Of Poles | Poles | 8 | |||
| Rated Voltage | VDC | 310 | |||
| Rated Pace | Rpm | 3400 | |||
| Rated Torque | N.m | two.38 | three.3 | five | 6.6 |
| Rated Recent | Amps | .five | .six | .8 | 1 |
| Rated Electricity | KW | .75 | 1.03 | one.57 | 2.07 |
| Back again E.M.F | V/Krpm | 91.1 | 91.one | 91.1 | 88.6 |
| Torque Consistent | N.m/A | .87 | .87 | .87 | .845 |
| Entire body Duration | mm | one hundred thirty | 155 | a hundred and eighty | 205 |
| Sensor | Honeywell | ||||
| Insulation Course | H | ||||
Stepping Motor Personalized
Thorough Photographs
Cnc Motor Kits Brushless dc Motor with Brake
Brushless Dc Motor with Planetary Gearbox Bldc Motor with Encoder
Brushless Dc Motor Brushed Dc Motor Hybrid Stepper Motor
Firm Profile
HangZhou CZPT Co., Ltd was a higher technological innovation industry zone in HangZhou, china. Our items utilised in many varieties of equipment, these kinds of as 3d printer CNC equipment, health-related gear, weaving printing equipments and so on.
JKONGMOTOR warmly welcome ‘OEM’ & ‘ODM’ cooperations and other firms to create prolonged-expression cooperation with us.
Company spirit of sincere and great track record, received the recognition and help of the broad masses of clients, at the very same time with the domestic and foreign suppliers near group of passions, the business entered the phase of phase of benign growth, laying a strong foundation for the strategic objective of realizing only truly the sustainable improvement of the organization.
Equipments Display:
Creation Stream:
Package:
Certification:
1. who are we?
We are primarily based in ZheJiang , China, start off from 2011,sell to Domestic Market(26.00%),Western Europe(twenty.00%),North
The usa(twenty.00%),Northern Europe(ten.00%),Japanese Europe(7.00%),Africa(5.00%),Southeast Asia(5.00%),Mid East(5.00%),South The united states(2.00%). There are whole about fifty one-100 folks in our business office.
two. how can we promise high quality?
We are based in ZheJiang , China, begin from 2011,offer to Domestic Market(26.00%),Western Europe(twenty.00%),North
America(twenty.00%),Northern Europe(10.00%),Eastern Europe(7.00%),Africa(5.00%),Southeast Asia(5.00%),Mid East(5.00%),South The usa(2.00%). There are complete about fifty one-100 individuals in our workplace.
three.what can you acquire from us?
Often a pre-creation sample ahead of mass manufacturing
Often ultimate Inspection prior to cargo
4. why should you get from us not from other suppliers?
Specialist one particular-to-1 motor personalized . The world’s massive business of choice for high quality suppliers . ISO9001:2008 quality management program certification, through the CE, ROHS certification.
5. what providers can we offer?
Accepted Shipping and delivery Phrases: FOB,CFR,CIF,EXW,CIP,FCA,CPT,DDP,DDU,Express Supply,DAF,DES
Approved Payment Currency:USD,EUR,CAD,HKD,GBP,CNY
Acknowledged Payment Kind: T/T,L/C,D/P D/A,MoneyGram,Credit history Card,PayPal,Western Union,Money,Escrow
Language Spoken:English,Chinese
|
US $8-50 / Piece | |
10 Pieces (Min. Order) |
###
|
Shipping Cost:
Estimated freight per unit. |
To be negotiated |
|---|
###
| Application: | Universal, Industrial, Household Appliances, Car, Power Tools |
|---|---|
| Operating Speed: | High Speed |
| Excitation Mode: | Compound |
###
| Samples: |
US$ 50/Piece
1 Piece(Min.Order) need to confirm the cost with seller
|
|---|
###
| Customization: |
Available
|
|---|
###
| Specification | Unit | Model | ||||
| JK57BLS005 | JK57BLS01 | JK57BLS02 | JK57BLS03 | JK57BLS04 | ||
| Number Of Phase | Phase | 3 | ||||
| Number Of Poles | Poles | 4 | ||||
| Rated Voltage | VDC | 36 | ||||
| Rated Speed | Rpm | 4000 | ||||
| Rated Torque | N.m | 0.055 | 0.11 | 0.22 | 0.33 | 0.44 |
| Rated Current | Amps | 1.2 | 2 | 3.6 | 5.3 | 6.8 |
| Rated Power | W | 23 | 46 | 92 | 138 | 184 |
| Peak Torque | N.m | 0.16 | 0.33 | 0.66 | 1 | 1.32 |
| Peak Current | Amps | 3.5 | 6.8 | 11.5 | 15.5 | 20.5 |
| Back E.M.F | V/Krpm | 7.8 | 7.7 | 7.4 | 7.3 | 7.1 |
| Torque Constant | N.m/A | 0.074 | 0.073 | 0.07 | 0.07 | 0.068 |
| Rotor Inertia | g.cm2 | 30 | 75 | 119 | 173 | 230 |
| Body Length | mm | 37 | 47 | 67 | 87 | 107 |
| Weight | Kg | 0.33 | 0.44 | 0.75 | 1 | 1.25 |
| Sensor | Honeywell | |||||
| Insulation Class | B | |||||
| Degree of Protection | IP30 | |||||
| Storage Temperature | -25~+70ºC | |||||
| Operating Temperature | -15~+50ºC | |||||
| Working Humidity | 85% RH or below (no condensation) | |||||
| Working Environment | Outdoor (no direct sunlight), no corrosive gas, no flammable gas, no oil mist, no dust | |||||
| Altitude | 1000 meters or less | |||||
###
| 56JXE300K | |
| Ring material | Metal |
| Bearing at output | Ball bearings |
| Max. Radial (12mm from flange) | 300N |
| Max. shaft axial load | 200N |
| Radial play of shaft (near to flange) | ≤0.08mm |
| Axial play of shaft | ≤0.4mm |
| Backlash at no-load | ≤2.5° |
| Shaft press fit force, max | 300N |
###
| Motor Shaft Pinion Specifications | |||
| Module | 1 | ||
| No. of teeth | 12 | 15 | 9 |
| Pressure angle | 20° | ||
| Hole diameter | Φ6H7 | ||
| Reduction ratio | 1/4.25 1/15 1/18 1/23 1/52 1/61 1/72 1/96 1/121 1/220 1/260 1/307 | 1/3.6 1/13 1/43 1/154 1/187 | 1/5.33 1/28 |
###
| Gearbox Specifications: | ||||||
| Reduction ratio | Exact reduction ratio | Rated tolerance torque | Max momentary tolerance torque | Efficiency | L (mm) | Weight (g) |
| 1/3.6 1/4.25 1/5.33 | 1/3.6 1/4.25 1/5.33 | 3 N.m Max | 9 N.m | 90% | 37.8±0.5 | 489 |
| 1/13 1/15 1/18 1/23 1/28 | 1/12.96 1/15.30 1/18.06 1/22.67 1/28.44 | 12 N.m Max | 36 N.m | 0.81 | 49.5±0.5 | 681 |
| 1/43 1/52 1/61 1/72 1/96 1/121 | 1/42.69 1/51.84 1/61.20 1/72.25 1/96.33 1/120.89 | 24 N.m Max | 72 N.m | 73% | 60.8±0.5 | 871 |
| 1/154 1/187 1/220 1/260 1/307 | 1/153.69 1/186.62 1/220.32 1/260.10 1/307.06 | 30 N.m Max | 90 N.m | 0.66 | 71.9±0.5 | 1066 |
| Input & output same rotation direction; Motor Max. input speed: <6000rpm; Operating temperature range: -15ºC ~ +80ºC | ||||||
###
| Specification | Unit | Model | |||
| JK42BLS01 | JK42BLS02 | JK42BLS03 | JK42BLS04 | ||
| Number Of Phase | Phase | 3 | |||
| Number Of Poles | Poles | 8 | |||
| Rated Voltage | VDC | 24 | |||
| Rated Speed | Rpm | 4000 | |||
| Rated Torque | N.m | 0.0625 | 0.125 | 0.185 | 0.25 |
| Peak Current | Amps | 1.8 | 3.3 | 4.8 | 6.3 |
| Rated Power | W | 26 | 52.5 | 77.5 | 105 |
| Peak Torque | N.m | 0.19 | 0.38 | 0.56 | 0.75 |
| Peak Current | Amps | 5.4 | 10.6 | 15.5 | 20 |
| Back E.M.F | V/Krpm | 4.1 | 4.2 | 4.3 | 4.3 |
| Torque Constant | N.m/A | 0.039 | 0.04 | 0.041 | 0.041 |
| Rotor Inertia | g.cm2 | 24 | 48 | 72 | 96 |
| Body Length | mm | ||||
| Weight | Kg | ||||
| Sensor | Honeywell | ||||
| Insulation Class | B | ||||
| Degree of Protection | IP30 | ||||
| Storage Temperature | -25~+70ºC | ||||
| Operating Temperature | -15~+50ºC | ||||
| Working Humidity | 85% RH or below (no condensation) | ||||
| Working Environment | Outdoor (no direct sunlight), no corrosive gas, no flammable gas, no oil mist, no dust | ||||
| Altitude | 1000 meters or less | ||||
###
| Specification | Unit | Model | |||
| JK60BLS01 | JK60BLS02 | JK60BLS03 | JK60BLS04 | ||
| Number Of Phase | Phase | 3 | |||
| Number Of Poles | Poles | 8 | |||
| Rated Voltage | VDC | 48 | |||
| Rated Speed | Rpm | 3000 | |||
| Rated Torque | N.m | 0.3 | 0.6 | 0.9 | 1.2 |
| Rated Current | Amps | 2.8 | 5.2 | 7.5 | 9.5 |
| Rated Power | W | 94 | 188 | 283 | 377 |
| Peak Torque | N.m | 0.9 | 1.8 | 2.7 | 3.6 |
| Peak Current | Amps | 8.4 | 15.6 | 22.5 | 28.5 |
| Back E.M.F | V/Krpm | 12.1 | 12.6 | 12.4 | 13.3 |
| Torque Constant | N.m/A | 0.116 | 0.12 | 0.118 | 0.127 |
| Rotor Inertia | kg.cm2 | 0.24 | 0.48 | 0.72 | 0.96 |
| Body Length | mm | 78 | 99 | 120 | 141 |
| Weight | Kg | 0.85 | 1.25 | 1.65 | 2.05 |
| Sensor | Honeywell | ||||
| Insulation Class | B | ||||
| Degree of Protection | IP30 | ||||
| Storage Temperature | -25~+70ºC | ||||
| Operating Temperature | -15~+50ºC | ||||
| Working Humidity | 85% RH or below (no condensation) | ||||
| Working Environment | Outdoor (no direct sunlight), no corrosive gas, no flammable gas, no oil mist, no dust | ||||
| Altitude | 1000 meters or less | ||||
###
| Specification | Unit | Model | |||
| JK80BLS01 | JK80BLS02 | JK80BLS03 | JK80BLS04 | ||
| Number Of Phase | Phase | 3 | |||
| Number Of Poles | Poles | 4 | |||
| Rated Voltage | VDC | 48 | |||
| Rated Speed | Rpm | 3000 | |||
| Rated Torque | N.m | 0.35 | 0.7 | 1.05 | 1.4 |
| Rated Current | Amps | 3 | 5.5 | 8 | 10.5 |
| Rated Power | W | 110 | 220 | 330 | 440 |
| Peak Torque | N.m | 1.05 | 2.1 | 3.15 | 4.2 |
| Peak Current | Amps | 9 | 16.5 | 24 | 31.5 |
| Back E.M.F | V/Krpm | 13.5 | 13.3 | 13.1 | 13 |
| Torque Constant | N.m/A | 0.13 | 0.127 | 0.126 | 0.124 |
| Rotor Inertia | g.cm2 | 210 | 420 | 630 | 840 |
| Body Length | mm | 78 | 98 | 118 | 138 |
| Weight | Kg | 1.4 | 2 | 2.6 | 3.2 |
| Sensor | Honeywell | ||||
| Insulation Class | B | ||||
| Degree of Protection | IP30 | ||||
| Storage Temperature | -25~+70ºC | ||||
| Operating Temperature | -15~+50ºC | ||||
| Working Humidity | 85% RH or below (no condensation) | ||||
| Working Environment | Outdoor (no direct sunlight), no corrosive gas, no flammable gas, no oil mist, no dust | ||||
| Altitude | 1000 meters or less | ||||
###
| Specification | Unit | Model | ||||
| JK86BLS58 | JK86BLS71 | JK86BLS84 | JK86BLS98 | JK86BLS125 | ||
| Number Of Phase | Phase | 3 | ||||
| Number Of Poles | Poles | 8 | ||||
| Rated Voltage | VDC | 48 | ||||
| Rated Speed | Rpm | 3000 | ||||
| Rated Torque | N.m | 0.35 | 0.7 | 1.05 | 1.4 | 2.1 |
| Rated Current | Amps | 3 | 6.3 | 9 | 11.5 | 18 |
| Rated Power | W | 110 | 220 | 330 | 440 | 660 |
| Peak Torque | N.m | 1.05 | 2.1 | 3.15 | 4.2 | 6.3 |
| Peak Current | Amps | 9 | 19 | 27 | 35 | 54 |
| Back E.M.F | V/Krpm | 13.7 | 13 | 13.5 | 13.7 | 13.5 |
| Torque Constant | N.m/A | 0.13 | 0.12 | 0.13 | 0.13 | 0.13 |
| Rotor Inertia | g.cm2 | 400 | 800 | 1200 | 1600 | 2400 |
| Body Length | mm | 71 | 84.5 | 98 | 111.5 | 138.5 |
| Weight | Kg | 1.5 | 1.9 | 2.3 | 2.7 | 4 |
| Sensor | Honeywell | |||||
| Insulation Class | B | |||||
| Degree of Protection | IP30 | |||||
| Storage Temperature | -25~+70ºC | |||||
| Operating Temperature | -15~+50ºC | |||||
| Working Humidity | 85% RH or below (no condensation) | |||||
| Working Environment | Outdoor (no direct sunlight), no corrosive gas, no flammable gas, no oil mist, no dust | |||||
| Altitude | 1000 meters or less | |||||
###
| Specification | Unit | Model | |||
| JK110BLS050 | JK110BLS75 | JK110BLS100 | JK110BLS125 | ||
| Number Of Phase | Phase | 3 | |||
| Number Of Poles | Poles | 8 | |||
| Rated Voltage | VDC | 310 | |||
| Rated Speed | Rpm | 3400 | |||
| Rated Torque | N.m | 2.38 | 3.3 | 5 | 6.6 |
| Rated Current | Amps | 0.5 | 0.6 | 0.8 | 1 |
| Rated Power | KW | 0.75 | 1.03 | 1.57 | 2.07 |
| Back E.M.F | V/Krpm | 91.1 | 91.1 | 91.1 | 88.6 |
| Torque Constant | N.m/A | 0.87 | 0.87 | 0.87 | 0.845 |
| Body Length | mm | 130 | 155 | 180 | 205 |
| Sensor | Honeywell | ||||
| Insulation Class | H | ||||
|
US $8-50 / Piece | |
10 Pieces (Min. Order) |
###
|
Shipping Cost:
Estimated freight per unit. |
To be negotiated |
|---|
###
| Application: | Universal, Industrial, Household Appliances, Car, Power Tools |
|---|---|
| Operating Speed: | High Speed |
| Excitation Mode: | Compound |
###
| Samples: |
US$ 50/Piece
1 Piece(Min.Order) need to confirm the cost with seller
|
|---|
###
| Customization: |
Available
|
|---|
###
| Specification | Unit | Model | ||||
| JK57BLS005 | JK57BLS01 | JK57BLS02 | JK57BLS03 | JK57BLS04 | ||
| Number Of Phase | Phase | 3 | ||||
| Number Of Poles | Poles | 4 | ||||
| Rated Voltage | VDC | 36 | ||||
| Rated Speed | Rpm | 4000 | ||||
| Rated Torque | N.m | 0.055 | 0.11 | 0.22 | 0.33 | 0.44 |
| Rated Current | Amps | 1.2 | 2 | 3.6 | 5.3 | 6.8 |
| Rated Power | W | 23 | 46 | 92 | 138 | 184 |
| Peak Torque | N.m | 0.16 | 0.33 | 0.66 | 1 | 1.32 |
| Peak Current | Amps | 3.5 | 6.8 | 11.5 | 15.5 | 20.5 |
| Back E.M.F | V/Krpm | 7.8 | 7.7 | 7.4 | 7.3 | 7.1 |
| Torque Constant | N.m/A | 0.074 | 0.073 | 0.07 | 0.07 | 0.068 |
| Rotor Inertia | g.cm2 | 30 | 75 | 119 | 173 | 230 |
| Body Length | mm | 37 | 47 | 67 | 87 | 107 |
| Weight | Kg | 0.33 | 0.44 | 0.75 | 1 | 1.25 |
| Sensor | Honeywell | |||||
| Insulation Class | B | |||||
| Degree of Protection | IP30 | |||||
| Storage Temperature | -25~+70ºC | |||||
| Operating Temperature | -15~+50ºC | |||||
| Working Humidity | 85% RH or below (no condensation) | |||||
| Working Environment | Outdoor (no direct sunlight), no corrosive gas, no flammable gas, no oil mist, no dust | |||||
| Altitude | 1000 meters or less | |||||
###
| 56JXE300K | |
| Ring material | Metal |
| Bearing at output | Ball bearings |
| Max. Radial (12mm from flange) | 300N |
| Max. shaft axial load | 200N |
| Radial play of shaft (near to flange) | ≤0.08mm |
| Axial play of shaft | ≤0.4mm |
| Backlash at no-load | ≤2.5° |
| Shaft press fit force, max | 300N |
###
| Motor Shaft Pinion Specifications | |||
| Module | 1 | ||
| No. of teeth | 12 | 15 | 9 |
| Pressure angle | 20° | ||
| Hole diameter | Φ6H7 | ||
| Reduction ratio | 1/4.25 1/15 1/18 1/23 1/52 1/61 1/72 1/96 1/121 1/220 1/260 1/307 | 1/3.6 1/13 1/43 1/154 1/187 | 1/5.33 1/28 |
###
| Gearbox Specifications: | ||||||
| Reduction ratio | Exact reduction ratio | Rated tolerance torque | Max momentary tolerance torque | Efficiency | L (mm) | Weight (g) |
| 1/3.6 1/4.25 1/5.33 | 1/3.6 1/4.25 1/5.33 | 3 N.m Max | 9 N.m | 90% | 37.8±0.5 | 489 |
| 1/13 1/15 1/18 1/23 1/28 | 1/12.96 1/15.30 1/18.06 1/22.67 1/28.44 | 12 N.m Max | 36 N.m | 0.81 | 49.5±0.5 | 681 |
| 1/43 1/52 1/61 1/72 1/96 1/121 | 1/42.69 1/51.84 1/61.20 1/72.25 1/96.33 1/120.89 | 24 N.m Max | 72 N.m | 73% | 60.8±0.5 | 871 |
| 1/154 1/187 1/220 1/260 1/307 | 1/153.69 1/186.62 1/220.32 1/260.10 1/307.06 | 30 N.m Max | 90 N.m | 0.66 | 71.9±0.5 | 1066 |
| Input & output same rotation direction; Motor Max. input speed: <6000rpm; Operating temperature range: -15ºC ~ +80ºC | ||||||
###
| Specification | Unit | Model | |||
| JK42BLS01 | JK42BLS02 | JK42BLS03 | JK42BLS04 | ||
| Number Of Phase | Phase | 3 | |||
| Number Of Poles | Poles | 8 | |||
| Rated Voltage | VDC | 24 | |||
| Rated Speed | Rpm | 4000 | |||
| Rated Torque | N.m | 0.0625 | 0.125 | 0.185 | 0.25 |
| Peak Current | Amps | 1.8 | 3.3 | 4.8 | 6.3 |
| Rated Power | W | 26 | 52.5 | 77.5 | 105 |
| Peak Torque | N.m | 0.19 | 0.38 | 0.56 | 0.75 |
| Peak Current | Amps | 5.4 | 10.6 | 15.5 | 20 |
| Back E.M.F | V/Krpm | 4.1 | 4.2 | 4.3 | 4.3 |
| Torque Constant | N.m/A | 0.039 | 0.04 | 0.041 | 0.041 |
| Rotor Inertia | g.cm2 | 24 | 48 | 72 | 96 |
| Body Length | mm | ||||
| Weight | Kg | ||||
| Sensor | Honeywell | ||||
| Insulation Class | B | ||||
| Degree of Protection | IP30 | ||||
| Storage Temperature | -25~+70ºC | ||||
| Operating Temperature | -15~+50ºC | ||||
| Working Humidity | 85% RH or below (no condensation) | ||||
| Working Environment | Outdoor (no direct sunlight), no corrosive gas, no flammable gas, no oil mist, no dust | ||||
| Altitude | 1000 meters or less | ||||
###
| Specification | Unit | Model | |||
| JK60BLS01 | JK60BLS02 | JK60BLS03 | JK60BLS04 | ||
| Number Of Phase | Phase | 3 | |||
| Number Of Poles | Poles | 8 | |||
| Rated Voltage | VDC | 48 | |||
| Rated Speed | Rpm | 3000 | |||
| Rated Torque | N.m | 0.3 | 0.6 | 0.9 | 1.2 |
| Rated Current | Amps | 2.8 | 5.2 | 7.5 | 9.5 |
| Rated Power | W | 94 | 188 | 283 | 377 |
| Peak Torque | N.m | 0.9 | 1.8 | 2.7 | 3.6 |
| Peak Current | Amps | 8.4 | 15.6 | 22.5 | 28.5 |
| Back E.M.F | V/Krpm | 12.1 | 12.6 | 12.4 | 13.3 |
| Torque Constant | N.m/A | 0.116 | 0.12 | 0.118 | 0.127 |
| Rotor Inertia | kg.cm2 | 0.24 | 0.48 | 0.72 | 0.96 |
| Body Length | mm | 78 | 99 | 120 | 141 |
| Weight | Kg | 0.85 | 1.25 | 1.65 | 2.05 |
| Sensor | Honeywell | ||||
| Insulation Class | B | ||||
| Degree of Protection | IP30 | ||||
| Storage Temperature | -25~+70ºC | ||||
| Operating Temperature | -15~+50ºC | ||||
| Working Humidity | 85% RH or below (no condensation) | ||||
| Working Environment | Outdoor (no direct sunlight), no corrosive gas, no flammable gas, no oil mist, no dust | ||||
| Altitude | 1000 meters or less | ||||
###
| Specification | Unit | Model | |||
| JK80BLS01 | JK80BLS02 | JK80BLS03 | JK80BLS04 | ||
| Number Of Phase | Phase | 3 | |||
| Number Of Poles | Poles | 4 | |||
| Rated Voltage | VDC | 48 | |||
| Rated Speed | Rpm | 3000 | |||
| Rated Torque | N.m | 0.35 | 0.7 | 1.05 | 1.4 |
| Rated Current | Amps | 3 | 5.5 | 8 | 10.5 |
| Rated Power | W | 110 | 220 | 330 | 440 |
| Peak Torque | N.m | 1.05 | 2.1 | 3.15 | 4.2 |
| Peak Current | Amps | 9 | 16.5 | 24 | 31.5 |
| Back E.M.F | V/Krpm | 13.5 | 13.3 | 13.1 | 13 |
| Torque Constant | N.m/A | 0.13 | 0.127 | 0.126 | 0.124 |
| Rotor Inertia | g.cm2 | 210 | 420 | 630 | 840 |
| Body Length | mm | 78 | 98 | 118 | 138 |
| Weight | Kg | 1.4 | 2 | 2.6 | 3.2 |
| Sensor | Honeywell | ||||
| Insulation Class | B | ||||
| Degree of Protection | IP30 | ||||
| Storage Temperature | -25~+70ºC | ||||
| Operating Temperature | -15~+50ºC | ||||
| Working Humidity | 85% RH or below (no condensation) | ||||
| Working Environment | Outdoor (no direct sunlight), no corrosive gas, no flammable gas, no oil mist, no dust | ||||
| Altitude | 1000 meters or less | ||||
###
| Specification | Unit | Model | ||||
| JK86BLS58 | JK86BLS71 | JK86BLS84 | JK86BLS98 | JK86BLS125 | ||
| Number Of Phase | Phase | 3 | ||||
| Number Of Poles | Poles | 8 | ||||
| Rated Voltage | VDC | 48 | ||||
| Rated Speed | Rpm | 3000 | ||||
| Rated Torque | N.m | 0.35 | 0.7 | 1.05 | 1.4 | 2.1 |
| Rated Current | Amps | 3 | 6.3 | 9 | 11.5 | 18 |
| Rated Power | W | 110 | 220 | 330 | 440 | 660 |
| Peak Torque | N.m | 1.05 | 2.1 | 3.15 | 4.2 | 6.3 |
| Peak Current | Amps | 9 | 19 | 27 | 35 | 54 |
| Back E.M.F | V/Krpm | 13.7 | 13 | 13.5 | 13.7 | 13.5 |
| Torque Constant | N.m/A | 0.13 | 0.12 | 0.13 | 0.13 | 0.13 |
| Rotor Inertia | g.cm2 | 400 | 800 | 1200 | 1600 | 2400 |
| Body Length | mm | 71 | 84.5 | 98 | 111.5 | 138.5 |
| Weight | Kg | 1.5 | 1.9 | 2.3 | 2.7 | 4 |
| Sensor | Honeywell | |||||
| Insulation Class | B | |||||
| Degree of Protection | IP30 | |||||
| Storage Temperature | -25~+70ºC | |||||
| Operating Temperature | -15~+50ºC | |||||
| Working Humidity | 85% RH or below (no condensation) | |||||
| Working Environment | Outdoor (no direct sunlight), no corrosive gas, no flammable gas, no oil mist, no dust | |||||
| Altitude | 1000 meters or less | |||||
###
| Specification | Unit | Model | |||
| JK110BLS050 | JK110BLS75 | JK110BLS100 | JK110BLS125 | ||
| Number Of Phase | Phase | 3 | |||
| Number Of Poles | Poles | 8 | |||
| Rated Voltage | VDC | 310 | |||
| Rated Speed | Rpm | 3400 | |||
| Rated Torque | N.m | 2.38 | 3.3 | 5 | 6.6 |
| Rated Current | Amps | 0.5 | 0.6 | 0.8 | 1 |
| Rated Power | KW | 0.75 | 1.03 | 1.57 | 2.07 |
| Back E.M.F | V/Krpm | 91.1 | 91.1 | 91.1 | 88.6 |
| Torque Constant | N.m/A | 0.87 | 0.87 | 0.87 | 0.845 |
| Body Length | mm | 130 | 155 | 180 | 205 |
| Sensor | Honeywell | ||||
| Insulation Class | H | ||||
The Basics of a Planetary Motor
A Planetary Motor is a type of gearmotor that uses multiple planetary gears to deliver torque. This system minimizes the chances of failure of individual gears and increases output capacity. Compared to the planetary motor, the spur gear motor is less complex and less expensive. However, a spur gear motor is generally more suitable for applications requiring low torque. This is because each gear is responsible for the entire load, limiting its torque.
Self-centering planetary gears
This self-centering mechanism for a planetary motor is based on a helical arrangement. The helical structure involves a sun-planet, with its crown and slope modified. The gears are mounted on a ring and share the load evenly. The helical arrangement can be either self-centering or self-resonant. This method is suited for both applications.
A helical planetary gear transmission is illustrated in FIG. 1. A helical configuration includes an output shaft 18 and a sun gear 18. The drive shaft extends through an opening in the cover to engage drive pins on the planet carriers. The drive shaft of the planetary gears can be fixed to the helical arrangement or can be removable. The transmission system is symmetrical, allowing the output shaft of the planetary motor to rotate radially in response to the forces acting on the planet gears.
A flexible pin can improve load sharing. This modification may decrease the face load distribution, but increases the (K_Hbeta) parameter. This effect affects the gear rating and life. It is important to understand the effects of flexible pins. It is worth noting that there are several other disadvantages of flexible pins in helical PGSs. The benefits of flexible pins are discussed below.
Using self-centering planetary gears for a helical planetary motor is essential for symmetrical force distribution. These gears ensure the symmetry of force distribution. They can also be used for self-centering applications. Self-centering planetary gears also guarantee the proper force distribution. They are used to drive a planetary motor. The gearhead is made of a ring gear, and the output shaft is supported by two ball bearings. Self-centering planetary gears can handle a high torque input, and can be suited for many applications.
To solve for a planetary gear mechanism, you need to find its pitch curve. The first step is to find the radius of the internal gear ring. A noncircular planetary gear mechanism should be able to satisfy constraints that can be complex and nonlinear. Using a computer, you can solve for these constraints by analyzing the profile of the planetary wheel’s tooth curve.
High torque
Compared to the conventional planetary motors, high-torque planetary motors have a higher output torque and better transmission efficiency. The high-torque planetary motors are designed to withstand large loads and are used in many types of applications, such as medical equipment and miniature consumer electronics. Their compact design makes them suitable for small space-saving applications. In addition, these motors are designed for high-speed operation.
They come with a variety of shaft configurations and have a wide range of price-performance ratios. The FAULHABER planetary gearboxes are made of plastic, resulting in a good price-performance ratio. In addition, plastic input stage gears are used in applications requiring high torques, and steel input stage gears are available for higher speeds. For difficult operating conditions, modified lubrication is available.
Various planetary gear motors are available in different sizes and power levels. Generally, planetary gear motors are made of steel, brass, or plastic, though some use plastic for their gears. Steel-cut gears are the most durable, and are ideal for applications that require a high amount of torque. Similarly, nickel-steel gears are more lubricated and can withstand a high amount of wear.
The output torque of a high-torque planetary gearbox depends on its rated input speed. Industrial-grade high-torque planetary gearboxes are capable of up to 18000 RPM. Their output torque is not higher than 2000 nm. They are also used in machines where a planet is decelerating. Their working temperature ranges between 25 and 100 degrees Celsius. For best results, it is best to choose the right size for the application.
A high-torque planetary gearbox is the most suitable type of high-torque planetary motor. It is important to determine the deceleration ratio before buying one. If there is no product catalog that matches your servo motor, consider buying a close-fitting high-torque planetary gearbox. There are also high-torque planetary gearboxes available for custom-made applications.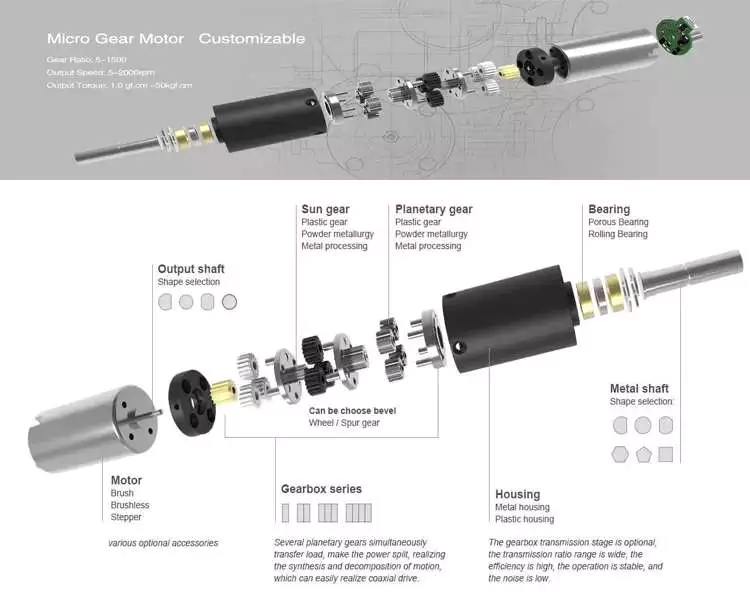
High efficiency
A planetary gearbox is a type of mechanical device that is used for high-torque transmission. This gearbox is made of multiple pairs of gears. Large gears on the output shaft mesh with small gears on the input shaft. The ratio between the big and small gear teeth determines the transmittable torque. High-efficiency planetary gearheads are available for linear motion, axial loads, and sterilizable applications.
The AG2400 high-end gear unit series is ideally matched to Beckhoff’s extensive line of servomotors and gearboxes. Its single-stage and multi-stage transmission ratios are highly flexible and can be matched to different robot types. Its modified lubrication helps it operate in difficult operating conditions. These high-performance gear units are available in a wide range of sizes.
A planetary gear motor can be made of steel, nickel-steel, or brass. In addition to steel, some models use plastic. The planetary gears share work between multiple gears, making it easy to transfer high amounts of power without putting a lot of stress on the gears. The gears in a planetary gear motor are held together by a movable arm. High-efficiency planetary gear motors are more efficient than traditional gearmotors.
While a planetary gear motor can generate torque, it is more efficient and cheaper to produce. The planetary gear system is designed with all gears operating in synchrony, minimizing the chance of a single gear failure. The efficiency of a planetary gearmotor makes it a popular choice for high-torque applications. This type of motor is suitable for many applications, and is less expensive than a standard geared motor.
The planetary gearbox is a combination of a planetary type gearbox and a DC motor. The planetary gearbox is compact, versatile, and efficient, and can be used in a wide range of industrial environments. The planetary gearbox with an HN210 DC motor is used in a 22mm OD, PPH, and ph configuration with voltage operating between 6V and 24V. It is available in many configurations and can be custom-made to meet your application requirements.
High cost
In general, planetary gearmotors are more expensive than other configurations of gearmotors. This is due to the complexity of their design, which involves the use of a central sun gear and a set of planetary gears which mesh with each other. The entire assembly is enclosed in a larger internal tooth gear. However, planetary motors are more effective for higher load requirements. The cost of planetary motors varies depending on the number of gears and the number of planetary gears in the system.
If you want to build a planetary gearbox, you can purchase a gearbox for the motor. These gearboxes are often available with several ratios, and you can use any one to create a custom ratio. The cost of a gearbox depends on how much power you want to move with the gearbox, and how much gear ratio you need. You can even contact your local FRC team to purchase a gearbox for the motor.
Gearboxes play a major role in determining the efficiency of a planetary gearmotor. The output shafts used for this type of motor are usually made of steel or nickel-steel, while those used in planetary gearboxes are made from brass or plastic. The former is the most durable and is best for applications that require high torque. The latter, however, is more absorbent and is better at holding lubricant.
Using a planetary gearbox will allow you to reduce the input power required for the stepper motor. However, this is not without its downsides. A planetary gearbox can also be replaced with a spare part. A planetary gearbox is inexpensive, and its spare parts are inexpensive. A planetary gearbox has low cost compared to a planetary motor. Its advantages make it more desirable in certain applications.
Another advantage of a planetary gear unit is the ability to handle ultra-low speeds. Using a planetary gearbox allows stepper motors to avoid resonance zones, which can cause them to crawl. In addition, the planetary gear unit allows for safe and efficient cleaning. So, whether you’re considering a planetary gear unit for a particular application, these gear units can help you get exactly what you need.
editor by czh 2023-01-12
China NEMA 24 48V Low Rpm 3000rpm Brushless DC BLDC Planetary Gear Motor with Hot selling
Solution Description
Be aware:
The specifications can be designed in accordance to the customer’s demands!
Choice:
Custom-made shaft, functionality, voltage, guide wires…
Software:
swimming pool, automotive, semiconductor, chemical & healthcare, industrial automation, electrical power resource, instrument, measuring gear, place of work automation, numerous OEM software.
Parameter:
| Motor Model | BS601-78W | BS601-156W | BS601-234W |
| Rated Voltage(VDC) | forty eight | 48 | forty eight |
| Rated Pace(Rpm) | 3000 | 3000 | 3000 |
| Rated Torque(N.m) | .25 | .5 | .75 |
| Rated Electricity(W) | 78 | 156 | 234 |
| L1 Length(mm) | sixty six | 87 | 108 |
| Reducer Series | one | 2 |
| Transmission performance | 95% | 90% |
| Max radial load | 80N | 80N |
| Max axial load | 30N | 30N |
| Transmission torque | 40N.m | 60N.m |
| Reduction Ratio | 5,10 | 15,twenty,25,30,40,fifty |
| L2 Length(mm) | 58 | seventy five |
About Us:
I.CH movement co., LTD, headquartered in HangZhou, is a specialist manufacturer and provider of the motor. We have presented BLDC motor, BLDC Gear motor, BLDC Servo motor considering that 2006, which are widely employed in medical gear, automation gear, vehicle business, and 3D printer.
As a professional company who has expert teams, we can custom in accordance to your wants.
Certificate:
IOS9001, CE
Services:
1, OEM & ODM service.
Transport:
one, Carton, Pallet, or what you want.
two, The Supply time is about 30-45 days.
Customer’s Going to:
FAQ:
1, Are you a factory?
Sure, we have been in designing and providing excellent motors for customers.
2, Can you offer a sample?
Yes.
3, How long you could get ready samples?
If personalized one, about a 7 days around.
four, If My deal has missing products. What can I do?
Remember to make contact with our support crew and we will confirm your order with the package contents. We apologize for any inconvenience.
|
US $15 / Piece | |
1 Piece (Min. Order) |
###
| Application: | Universal, Industrial, Household Appliances, Power Tools |
|---|---|
| Operating Speed: | Low Speed |
| Function: | Control, Driving |
| Casing Protection: | Protection Type |
| Structure and Working Principle: | Brushless |
| Certification: | ISO9001, CCC |
###
| Customization: |
Available
|
|---|
###
| Motor Model | BS601-78W | BS601-156W | BS601-234W |
| Rated Voltage(VDC) | 48 | 48 | 48 |
| Rated Speed(Rpm) | 3000 | 3000 | 3000 |
| Rated Torque(N.m) | 0.25 | 0.5 | 0.75 |
| Rated Power(W) | 78 | 156 | 234 |
| L1 Length(mm) | 66 | 87 | 108 |
###
| Reducer Series | 1 | 2 |
| Transmission efficiency | 95% | 90% |
| Max radial load | 80N | 80N |
| Max axial load | 30N | 30N |
| Transmission torque | 40N.m | 60N.m |
| Reduction Ratio | 5,10 | 15,20,25,30,40,50 |
| L2 Length(mm) | 58 | 75 |
|
US $15 / Piece | |
1 Piece (Min. Order) |
###
| Application: | Universal, Industrial, Household Appliances, Power Tools |
|---|---|
| Operating Speed: | Low Speed |
| Function: | Control, Driving |
| Casing Protection: | Protection Type |
| Structure and Working Principle: | Brushless |
| Certification: | ISO9001, CCC |
###
| Customization: |
Available
|
|---|
###
| Motor Model | BS601-78W | BS601-156W | BS601-234W |
| Rated Voltage(VDC) | 48 | 48 | 48 |
| Rated Speed(Rpm) | 3000 | 3000 | 3000 |
| Rated Torque(N.m) | 0.25 | 0.5 | 0.75 |
| Rated Power(W) | 78 | 156 | 234 |
| L1 Length(mm) | 66 | 87 | 108 |
###
| Reducer Series | 1 | 2 |
| Transmission efficiency | 95% | 90% |
| Max radial load | 80N | 80N |
| Max axial load | 30N | 30N |
| Transmission torque | 40N.m | 60N.m |
| Reduction Ratio | 5,10 | 15,20,25,30,40,50 |
| L2 Length(mm) | 58 | 75 |
How to Assemble a Planetary Motor
A Planetary Motor uses multiple planetary surfaces to produce torque and rotational speed. The planetary system allows for a wide range of gear reductions. Planetary systems are particularly effective in applications where higher torques and torque density are needed. As such, they are a popular choice for electric vehicles and other applications where high-speed mobility is required. Nevertheless, there are many benefits associated with using a planetary motor. Read on to learn more about these motors.
VPLite
If you’re looking to replace the original VP, the VPLite has a similar output shaft as the original. This means that you can mix and match your original gear sets, including the input and output shafts. You can even mix metal inputs with plastic outputs. Moreover, if you decide to replace the gearbox, you can easily disassemble the entire unit and replace it with a new one without losing any output torque.
Compared to a planetary motor, a spur gear motor uses fewer gears and is therefore cheaper to produce. However, the latter isn’t suitable for high-torque applications. The torque produced by a planetary gearmotor is evenly distributed, which makes it ideal for applications that require higher torque. However, you may have to compromise on the torque output if you’re looking for a lightweight option.
The VersaPlanetary Lite gearbox replaces the aluminum ring gear with a 30% glass-filled nylon gear. This gearbox is available in two sizes, which means you can mix and match parts to get a better gear ratio. The VPLite gearbox also has a female 5mm hex output shaft. You can mix and match different gearboxes and planetary gearboxes for maximum efficiency.
VersaPlanetary
The VersaPlanetary is a highly versatile planetary motor that can be mounted in a variety of ways. Its unique design includes a removable shaft coupler system that makes it simple to swap out the motor with another. This planetary motor mounts in any position where a CIM motor mounts. Here’s how to assemble the motor. First, remove the hex output shaft from the VersaPlanetary output stage. Its single ring clip holds it in place. You can use a drill press to drill a hole into the output shaft.
After mounting the gearbox, you can then mount the motor. The mounting hardware included with the VersaPlanetary Planetary Motor comes with four 10-32 threaded holes on a two-inch bolt circle. You can use these holes to mount your VersaPlanetary on a CIM motor or a CIM-compatible motor. Once assembled, the VersaPlanetary gearbox has 72 different gear ratios.
The VersaPlanetary gearbox is interchangeable with regular planetary gearboxes. However, it does require additional parts. You can purchase a gearbox without the motor but you’ll need a pinion. The pinion attaches to the shaft of the motor. The gearbox is very sturdy and durable, so you won’t have to worry about it breaking or wearing out.
Self-centering planetary gears
A planetary motor is a simple mechanical device that rotates around a axis, with the planets moving around the shaft in a radial direction. The planets are positioned so that they mesh with both the sun gear and the output gears. The carrier 48 is flexibly connected to the drive shaft and can move depending on the forces exerted by the planet gears. In this way, the planets can always be in the optimal mesh with the output gears and sun gear.
The first step in developing a planetary gear motor is to identify the number of teeth in each planet. The number of teeth should be an integer. The tooth diameters of the planets should mesh with each other and the ring. Typically, the teeth of one planet must mesh with each other, but the spacing between them must be equal or greater than the other. This can be achieved by considering the tooth count of each planet, as well as the spacing between planets.
A second step is to align the planet gears with the output gears. In a planetary motor, self-centering planetary gears must be aligned with both input and output gears to provide maximum torque. For this to be possible, the planet gears must be connected with the output shaft and the input shaft. Similarly, the output shaft should also be able to align with the input gear.
Encoders
A planetary geared motor is a DC motor with a planetary gearbox. The motor can be used to drive heavy loads and has a ratio of 104:1. The shaft speed is 116rpm when it is unloaded. A planetary gearbox has a low backlash and is often used in applications that need high torque. Planetary Motor encoders can help you keep track of your robot’s position or speed.
They are also able to control motor position and speed with precision. Most of them feature high resolution. A 0.18-degree resolution encoder will give you a minimum of 2000 transitions per rotation between outputs A and B. The encoder is built to industrial standards and has a sturdy gearbox to avoid damage. The encoder’s robust design means it will not stall when the motor reaches its maximum speed.
There are many advantages to a planetary motor encoder. A high-quality one will not lose its position or speed even if it’s subject to shocks. A good quality planetary motor will also last a long time. Planetary motors are great for resale or for your own project. If you’re considering buying a planetary motor, consider this information. It’ll help you decide if a particular model is right for your needs.
Cost
There are several advantages of planetary motors. One of the biggest is their cost, but they can also be used in many different applications. They can be combined with a variety of gearboxes, and are ideal for various types of robots, laboratory automation, and production applications. Planetary gearboxes are available in many different materials, and plastic planetary gearboxes are an economical alternative. Plastic gearboxes reduce noise at higher speeds, and steel input stage gears are available for high torques. A modified lubrication system can help with difficult operating conditions.
In addition to being more durable, planetary motors are much more efficient. They use fewer gears, which lowers the overall cost of production. Depending on the application, a planetary motor can be used to move a heavy object, but is generally less expensive than its counterpart. It is a better choice for situations where the load is relatively low and the motor is not used frequently. If you need a very high torque output, a planetary motor may be the better option.
Planetary gear units are a good choice for applications requiring high precision, high dynamics, and high torque density. They can be designed and built using TwinCAT and TC Motion Designer, and are delivered as complete motor and gear unit assemblies. In a few simple steps, you can calculate the torque required and compare the costs of different planetary gear units. You can then choose the best model for your application. And because planetary gear units are so efficient, they are a great option for high-end industrial applications.
Applications
There are several different applications of the planetary motor. One such application is in motion control. Planetary gearboxes have many benefits, including high torque, low backlash, and torsional stiffness. They also have an extremely compact design, and can be used for a variety of applications, from rack and pinion drives to delta robotics. In many cases, they are less expensive to manufacture and use than other types of motors.
Another application for planetary gear units is in rotary tables. These machines require high precision and low backlash for their precise positioning. Planetary gears are also necessary for noise reduction, which is a common feature in rotary tables. High precision planetary gears can make the height adjustment of OP tables a breeze. And because they are extremely durable and require low noise, they are a great choice for this application. In this case, the planetary gear is matched with an AM8000 series servomotor, which gives a wide range of choices.
The planetary gear transmission is also widely used in helicopters, automobiles, and marine applications. It is more advanced than a countershaft drive, and is capable of higher torque to weight ratios. Other advantages include its compact design and reduced noise. A key concern in the development of this type of transmission is to minimize vibration. If the output of a planetary gear transmission system is loud, the vibration caused by this type of drive system may be too loud for comfort.
editor by czh 2022-12-26